Trans-cavity surgical robot operation arm system, robot and method
A surgical robot and operating arm technology, which is applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of inconvenient quick-change mechanism, large drive device, low stability of the mechanical arm, etc., and achieves compact structure and reduced volume. , to ensure the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
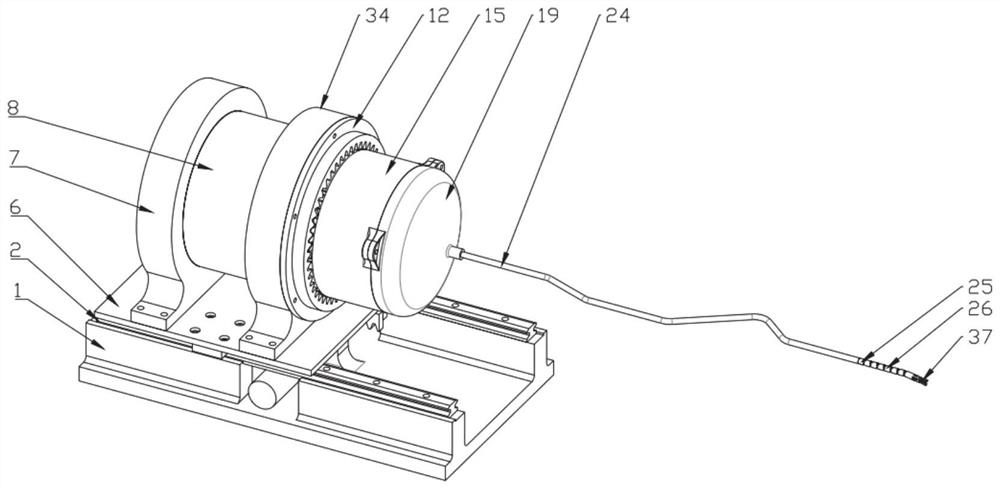
[0043] Such as figure 1 As shown, a robotic arm system for transluminal surgery includes: a drive module and an axial transmission module;
[0044] The axial transmission module includes a quick-change mechanism, the quick-change mechanism has a clamping structure and a cavity, and a radially movable transmission shaft is arranged in the cavity, and the transmission shaft has an axial rotation degree of freedom when moving to a set area;
[0045]The drive module includes a connecting piece that cooperates with the transmission shaft and a clamping piece that cooperates with the clamping structure. The transmission shaft is moved to the set area through the connecting piece to realize the cooperative connection for transmission; the clamping piece is connected with the clamping structure So as to realize quick disassembly and assembly.
[0046] It also includes an instrument arm module, the mechanical arm module includes an execution instrument; the axial transmission module i...
Embodiment 2
[0065] The present disclosure also provides a transluminal surgery robot, including the transluminal surgery robot manipulating arm system as described in the above embodiments, and the transcavity surgery robot manipulating arm system is used to perform transluminal surgery.
Embodiment 3
[0067] The present disclosure also provides a method for using the robotic arm system for transluminal surgery as described in the above embodiments, including:
[0068] The connection between the axial transmission module and the transmission structure of the drive module is realized through the cavity of the quick change mechanism;
[0069] The fixed connection between the axial transmission module and the drive module is realized through the clamping structure and clamping parts;
[0070] When a quick change is required, the quick change operation is performed by disassembling the clamping part and the clamping structure.
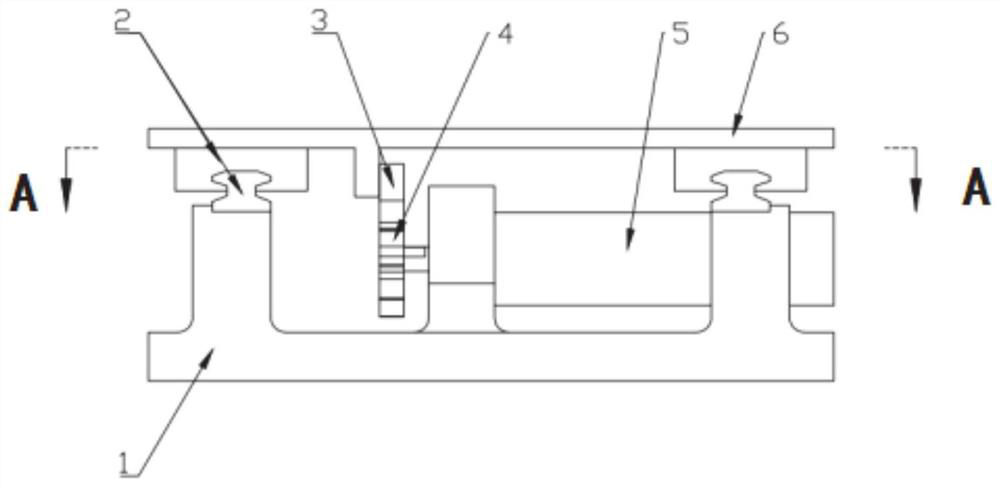
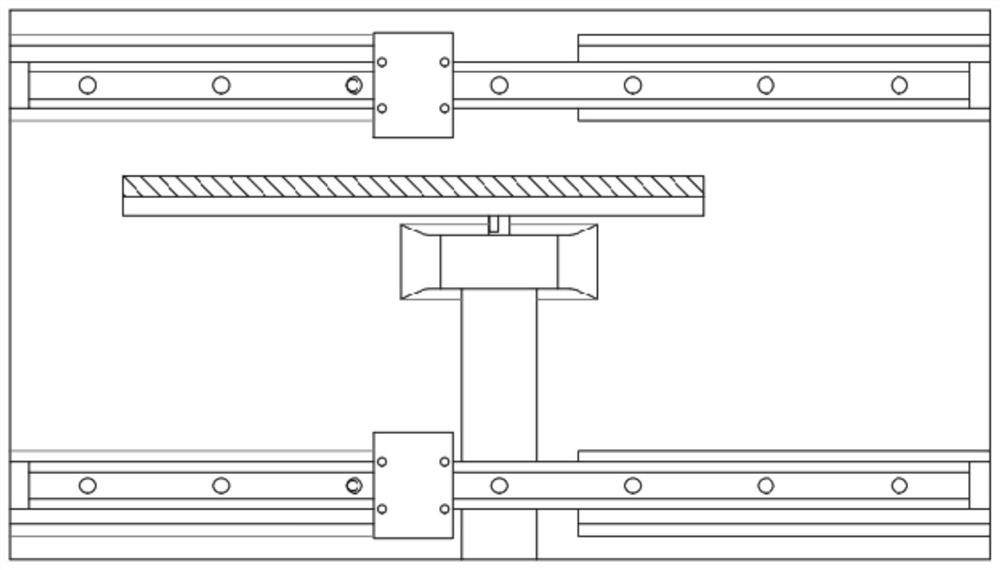
[0071] Further, the fixed base 1 is fixed to the external mechanism such as the surgical robot adjustment arm, and the linear motion drive motor 5 is installed on it, and its output shaft cooperates with the linear motion gear 4, and the rotary motion is driven by the rack and pinion pair (3, 4). It is converted into linear motion, and the linear motion i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com