Multi-robot mobile shelf task allocation method for intelligent warehouse
A multi-robot, task distribution technology, applied in the field of intelligent warehouse
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below with reference to the accompanying drawings and examples.
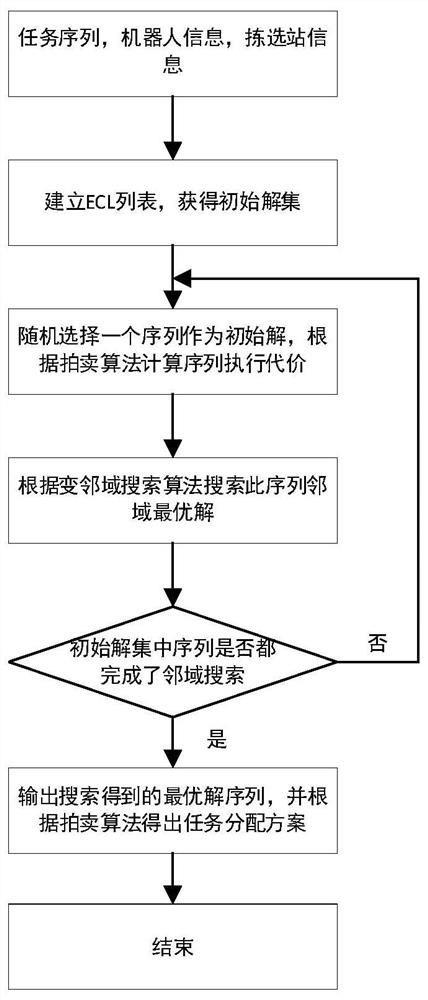
[0053] Such as figure 1 As shown, the present invention is used in the multi-robot mobile shelf task assignment method of intelligent warehouse, comprising the following steps:
[0054] Step 1: Input the data information of various objects in the smart warehouse, including: task information, robot information and picking station information. Randomly arrange the set of n tasks to be assigned to form a task sequence, expressed as L={t 1 ,t 2 ,...,t n}.
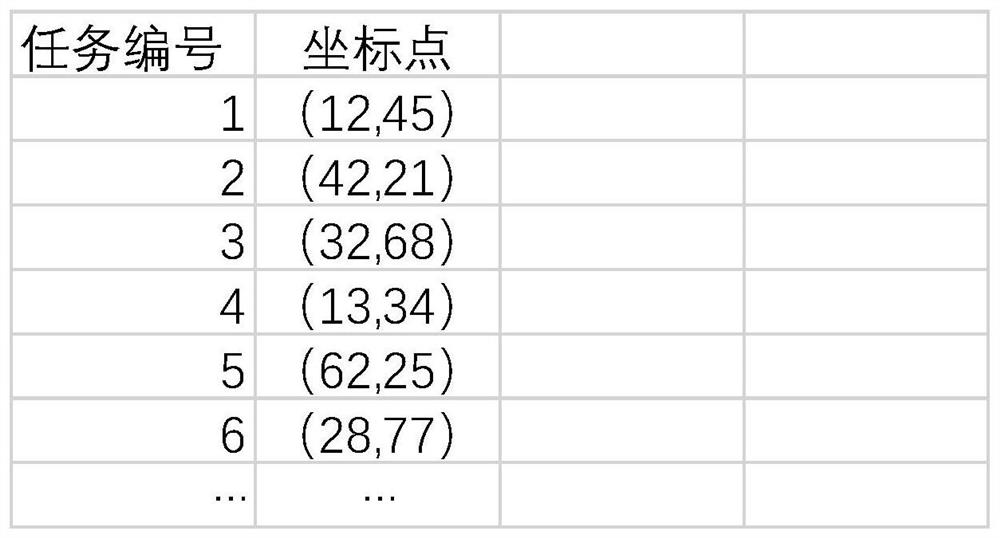
[0055] Such as figure 2 As shown, the task information refers to the number n of all tasks to be assigned in the task pool and the coordinate points where each task is located, and the number of all tasks in the task pool is defined as t 1 ,t 2 ,...,t n , the i-th task t i The coordinates are That is, the i-th task t i Corresponding to the coordinates of the shelf.
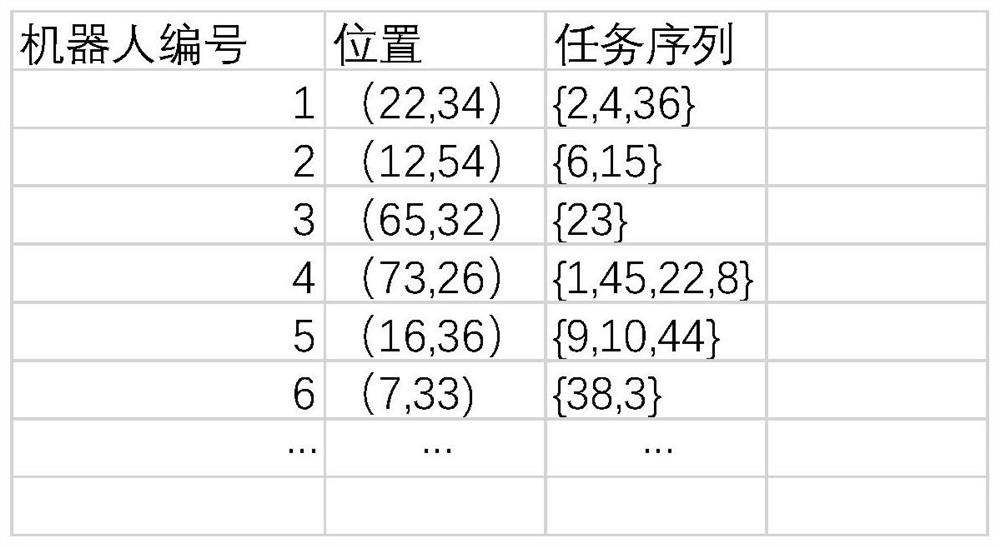
[0056] Such as image 3 A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com