Method for detecting retaining wall and obstacle behind vehicle in unloading region of mining region
A detection method and retaining wall technology, applied in the field of intelligent transportation, can solve the problems of retaining wall misidentification, uneconomical, false detection and missed detection, and achieve the effect of improving accuracy and reducing missed detection and false detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051]The technical solutions in the embodiments of the present invention will be apparent from the drawings in the embodiment of the present invention.
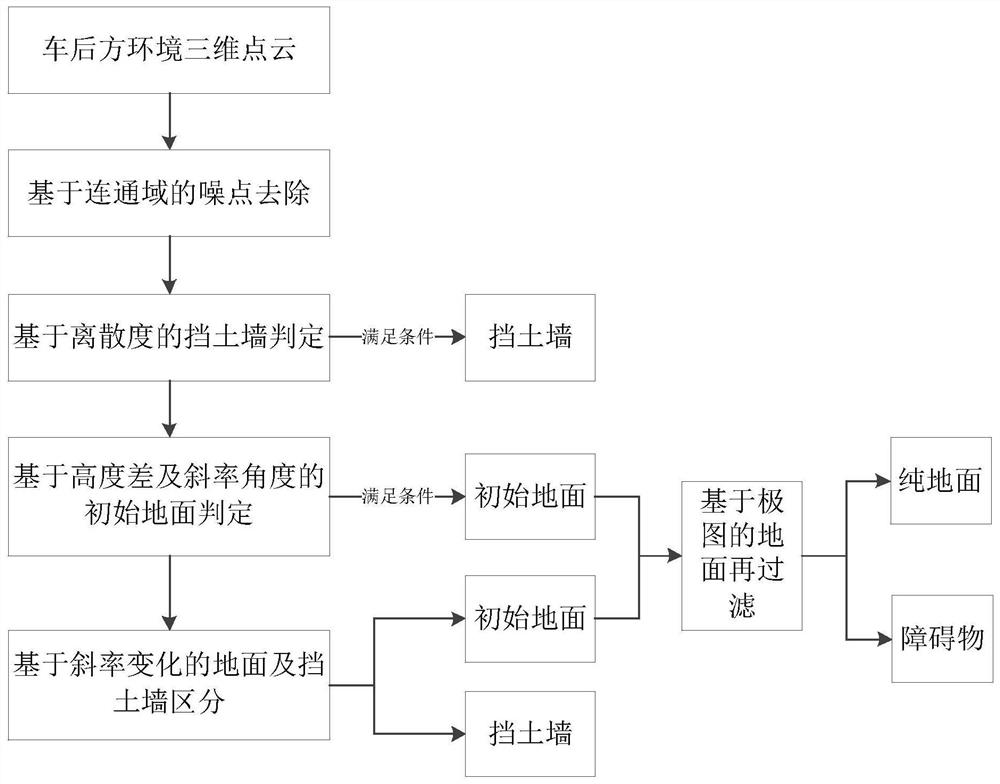
[0052]The present invention provides a method of detecting a retaining wall and an obstacle in a mine unloading area vehicle.figure 1 As shown, the specific implementation, for example:
[0053]Step 1. The three-dimensional dotted cloud-based noise-based removal is performed on the laser radar sensor collected by the laser radar sensor; the specific method is as follows:
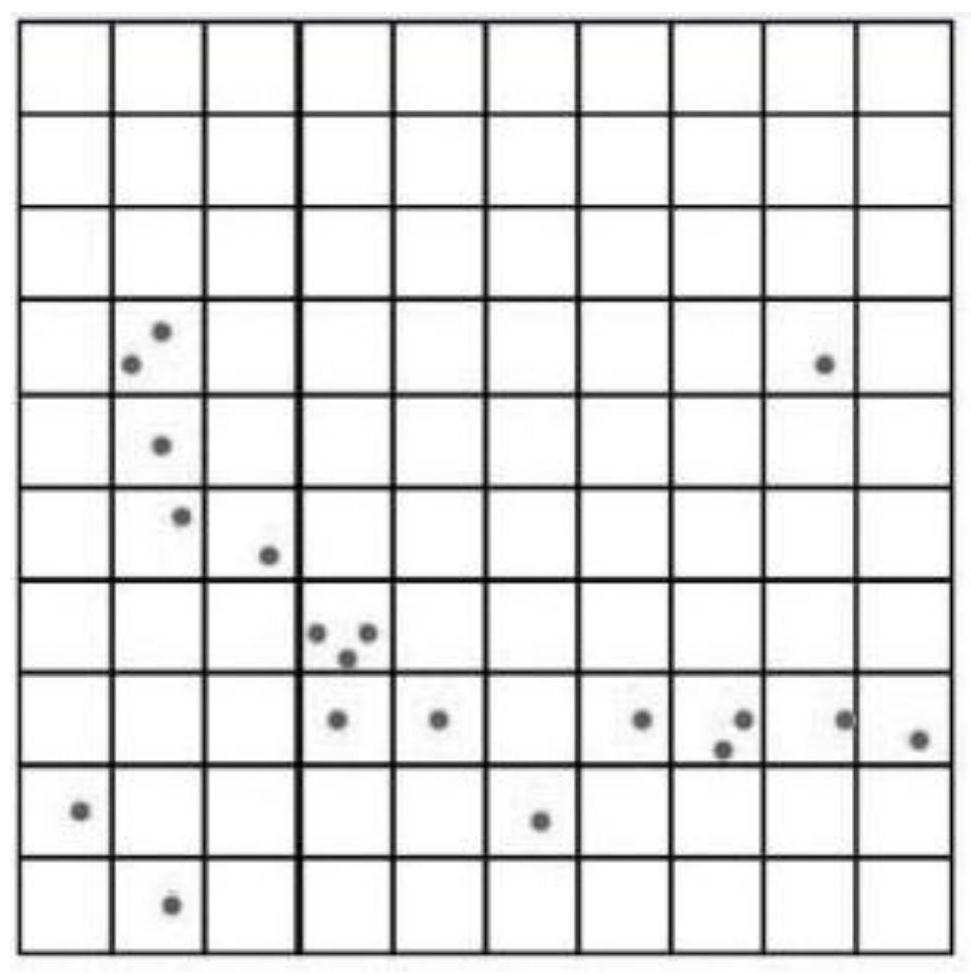
[0054](1) The original single frame of the Sagitar 16-wire laser radar sensor is projected to the XZ plane for griding, such asFigure 2A Indicated;
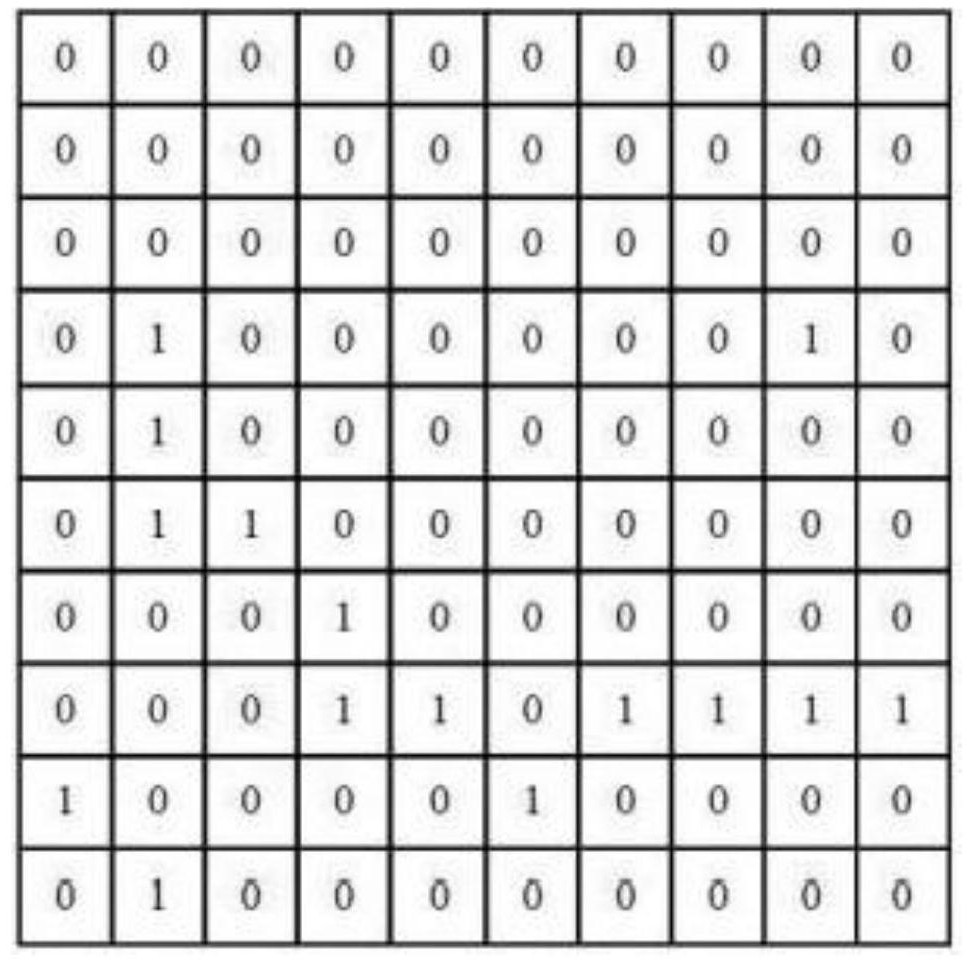
[0055](2) Initialize the raster unit that does not contain some points to TAG = 0, and the raster unit containing the TAG = 1, such asFigure 2B Indicated;
[0056](3) For the grid of TAG = 1, the binary neighborhood retracked algorithm is used, and the TAG is placed in the same consisting area, and the TAG starts from 2, and it i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com