Unmanned gyroplane landing control method
A control method and technology of the rotorcraft, applied in the direction of the rotorcraft, control/adjustment system, altitude or depth control, etc., can solve the problems of aircraft stall, landing failure, and slow pull-up of the fuselage pitch angle, so as to improve landing safety, The effect of a small touchdown rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
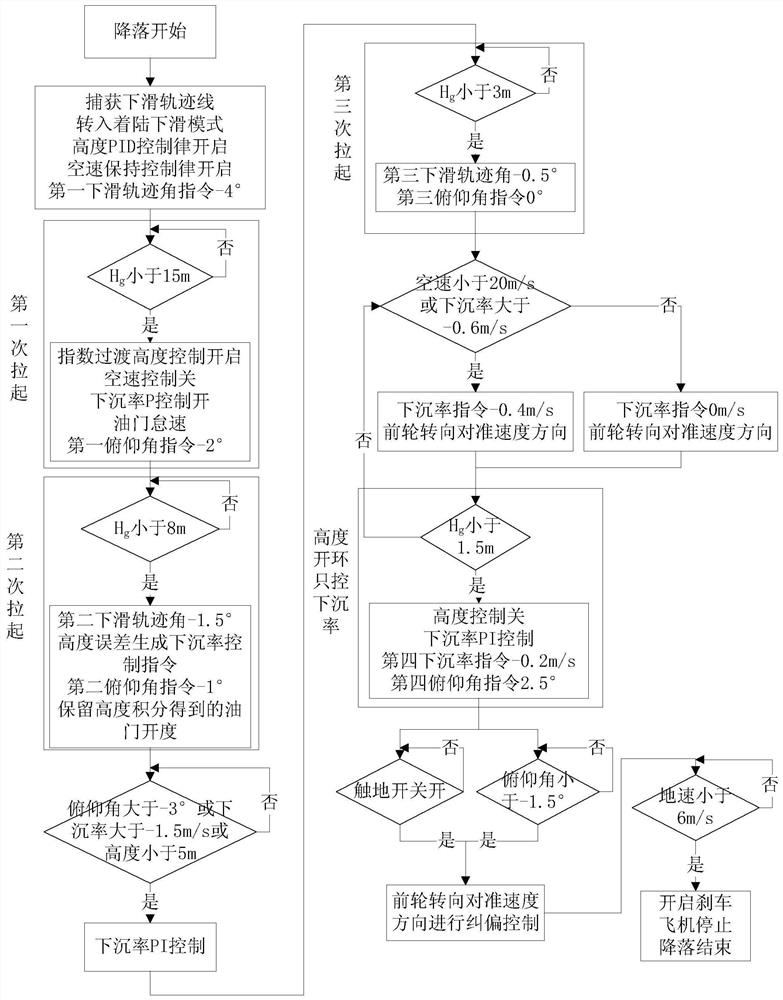
[0076] Taking a certain type of unmanned autogyro as an example, its landing control method is as follows:
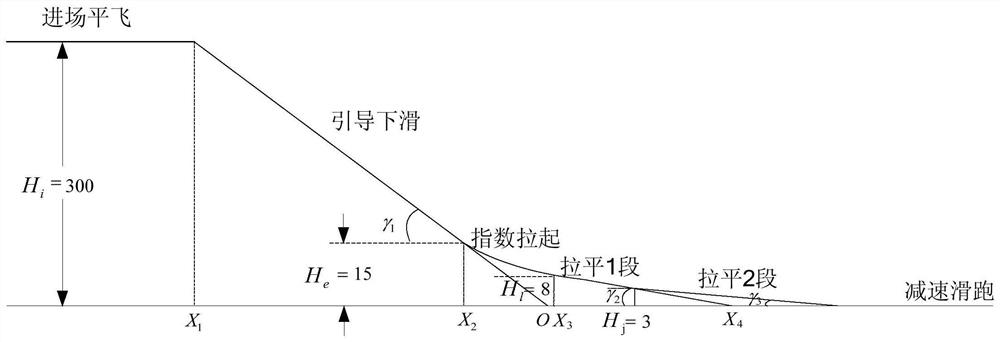
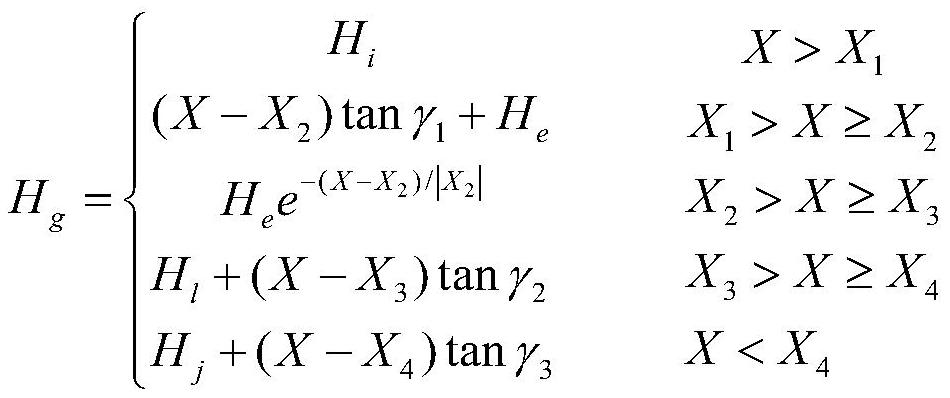
[0077] (1) When the unmanned autogyro begins to land, the level flight altitude is 300m. Cut from the level flight route to the glide route, capture the glide trajectory, switch to the landing glide mode, turn on the altitude control, keep the airspeed control on, and set the first Glide Trajectory Angle Command¶ 1 is -4°;
[0078] (2) Glide to the first preset ground clearance height H e For example, at 15m, start to pull up for the first time, keep the altitude control on, and give the first pitch angle command α 1 , α 1 =-2°, turn off the airspeed control, turn on the sinking rate P control, and lower the throttle to idle speed;
[0079] (3) Glide to the second preset ground clearance height H l when H l =8m, start the second pull-up, and give the second glide path angle commandγ 2 and the second pitch angle command, generate a sink rate control command accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com