Operation control method of space manipulator
A space manipulator, operation control technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as lack of coordination, cumbersome operation process, ability to perform tasks and efficiency limitations, etc., to reduce operational burden, flexible operation, and various modes Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention will be described in detail below with reference to the accompanying drawings and examples.
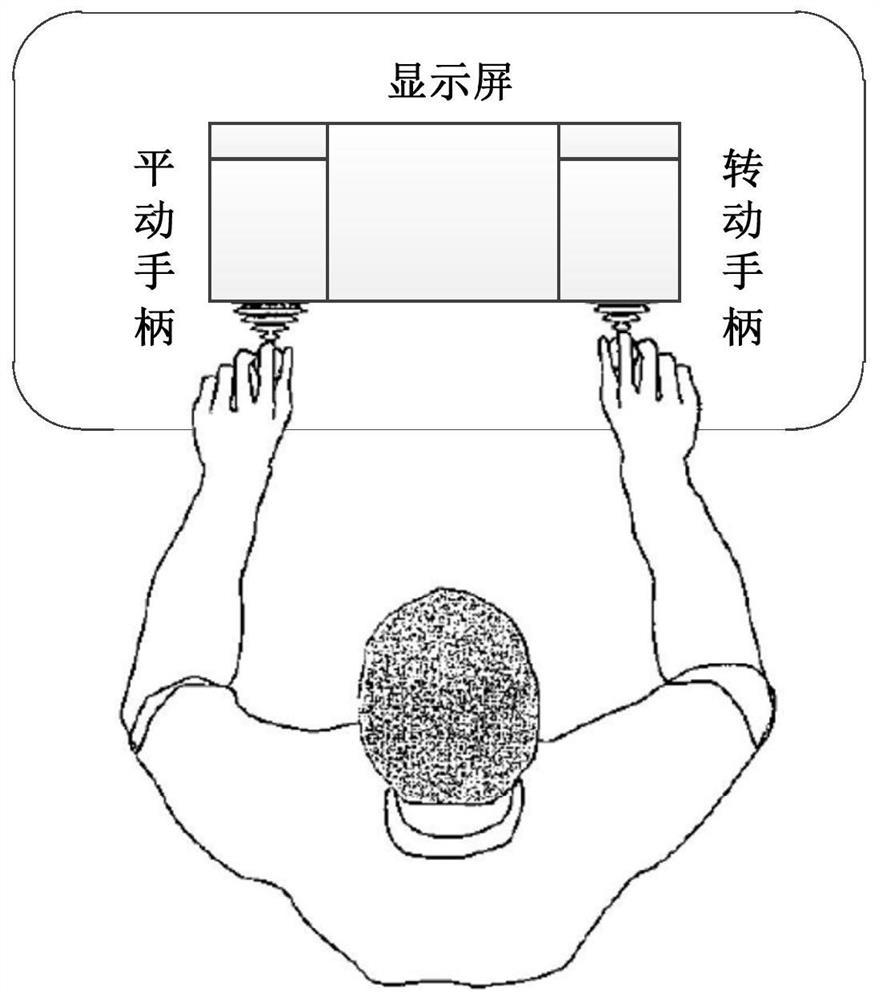
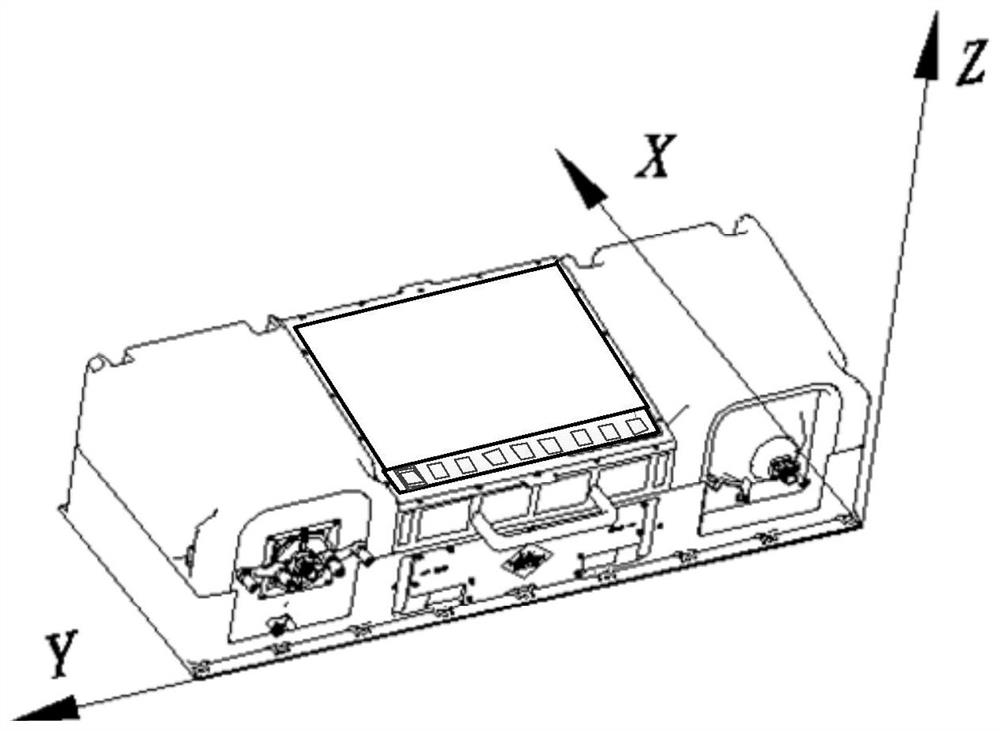
[0025] Such as figure 1 As shown, an execution device of an operation control method of a space manipulator in the present invention includes a three-degree-of-freedom translation handle 1 , a three-degree-of-freedom rotational handle 3 and a display and control module 2 .
[0026] When performing the operation of the space manipulator, after the device is powered on, the translation handle and the rotation handle return to the zero position under the action of the restoring force ( figure 1 middle handle end position).
[0027] The operation of the translational handle, rotating handle and display and control module is suitable for the operator to operate in a standing or sitting position, and its position and height can be adjusted according to the height of the platform. The spatial relationship between the operator, the translation handle, the rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com