Multi-robot cooperative cleaning method and device on photovoltaic module based on artificial intelligence
A multi-robot, photovoltaic module technology, applied in cleaning methods and utensils, using optical devices, chemical instruments and methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to further explain the technical means and effects of the present invention to achieve the intended purpose of the invention, the following, in conjunction with the accompanying drawings and preferred embodiments, will describe a method for collaborative cleaning of multiple robots on photovoltaic modules based on artificial intelligence proposed by the present invention and The device, its specific implementation, structure, features and functions are described in detail as follows. In the following description, different "one embodiment" or "another embodiment" do not necessarily refer to the same embodiment. Furthermore, the particular features, structures, or characteristics of one or more embodiments may be combined in any suitable manner.
[0043] Unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the technical field of the invention.
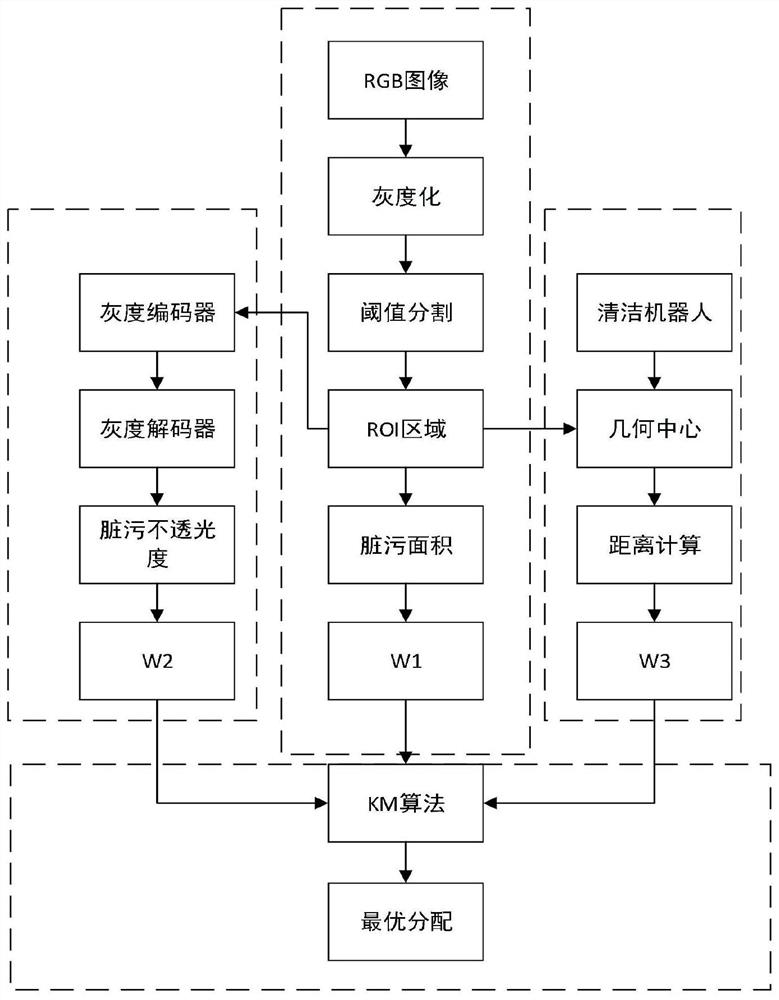
[0044] see figure 1 with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com