Unmanned sweeper based on machine vision and working method thereof
A machine vision and working method technology, applied in robot cleaning machines, manual sweeping machines, carpet cleaning, etc., can solve the problems of real-time positioning and map construction system improvement without unmanned sweeping machines, and achieve compact structure design, reasonable layout, Avoid the effect of a large turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
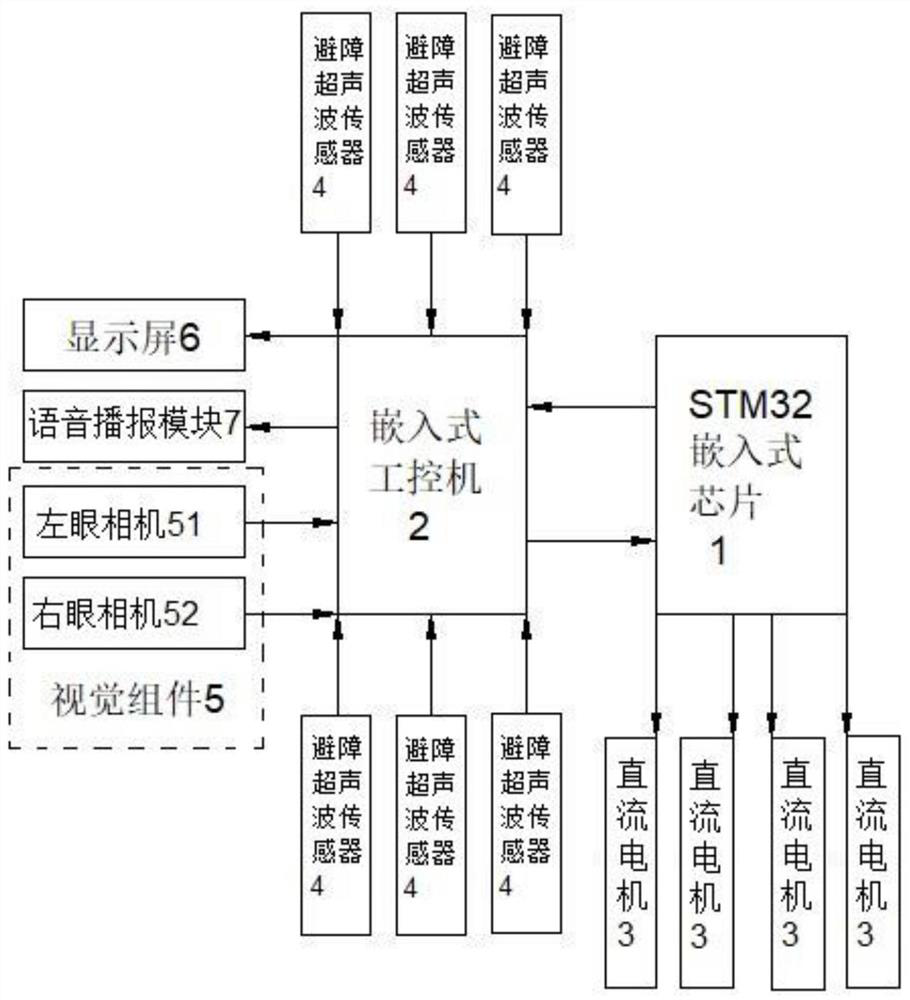
[0032] The working method of the unmanned sweeping machine based on machine vision of the present invention includes the following steps: the embedded industrial computer 2 receives the images collected by the left-eye camera 51 and the right-eye camera 52 in real time, The image collected by the eye camera 52 and the surrounding obstacle information of the obstacle avoidance ultrasonic sensor 4 calculate the real-time orientation and position of the unmanned sweeper body, and build a dense structure through the images collected by a large number of left-eye cameras 51 and right-eye cameras 52. The map transmits instructions to the STM32 embedded chip 1 to control the DC motor 3, so that the body of the unmanned sweeper can determine its own posture in real time and plan the path reasonably; when the images collected by the left-eye camera 51 and right-eye camera 52 are displayed back to the previous At a certain location, the location is identified through loop closure detecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com