Walking aid exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation engineering, can solve problems such as inability to move autonomously, and achieve the effect of compact design, large rotation range and high control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
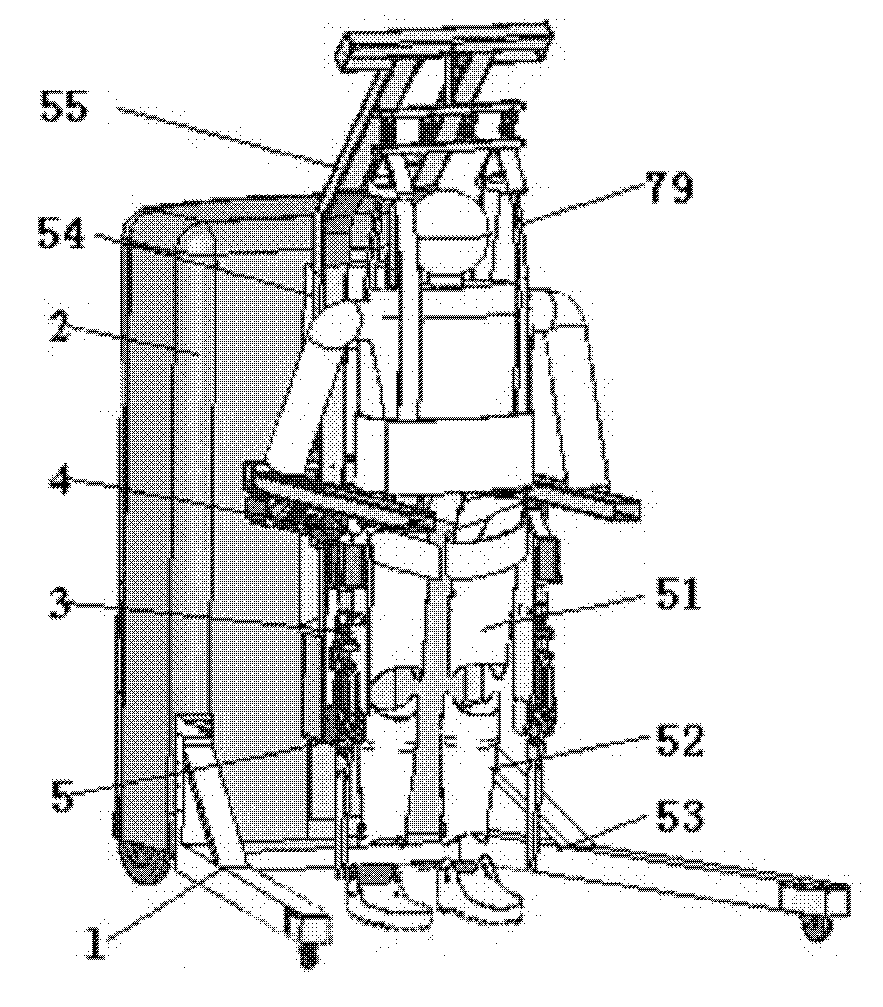
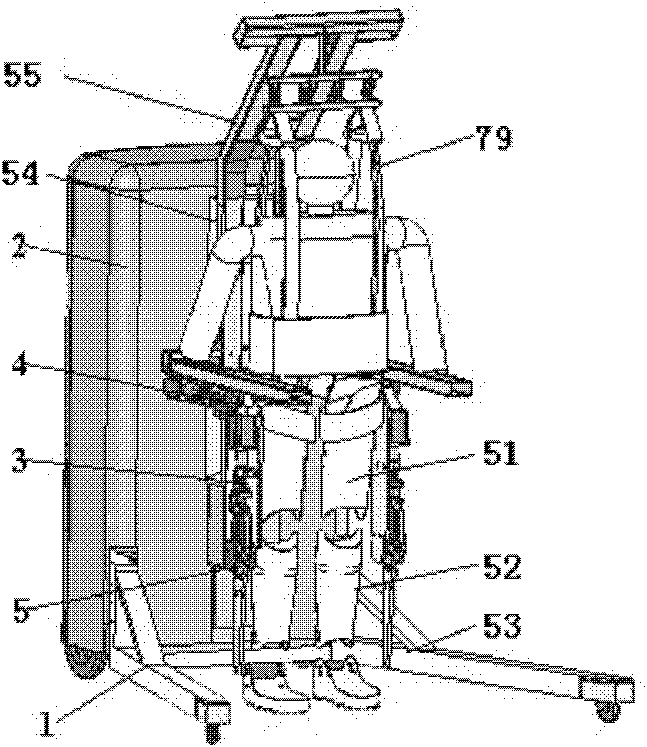
[0028] As shown in Fig. 1 and Fig. 2, the present embodiment includes: a mobile auxiliary mechanism 1, a control mechanism 2 and an exoskeleton prosthesis mechanism 3, wherein: the exoskeleton prosthesis mechanism 3 is connected with the mobile auxiliary mechanism 1, and the control mechanism 2 is connected with the mobile auxiliary mechanism 1 respectively. The mobile auxiliary mechanism 1 is connected with the exoskeleton prosthesis mechanism 3 .
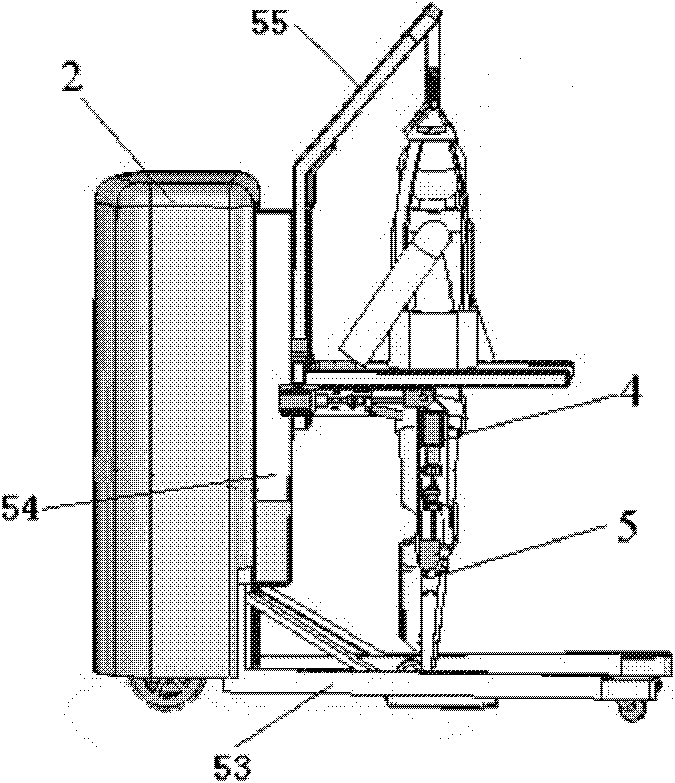
[0029] As shown in Figure 3, the exoskeleton prosthesis mechanism 3 includes: a hip joint 4 and a knee joint 5, wherein...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com