Depth map obtaining method and system, unmanned aerial vehicle orthogram generation method and medium
A depth map, UAV technology, applied in image analysis, image data processing, computer parts and other directions, can solve the problem of inaccurate measurement, and achieve the effect of improving the matching accuracy, reducing the error, and unifying the local depth.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
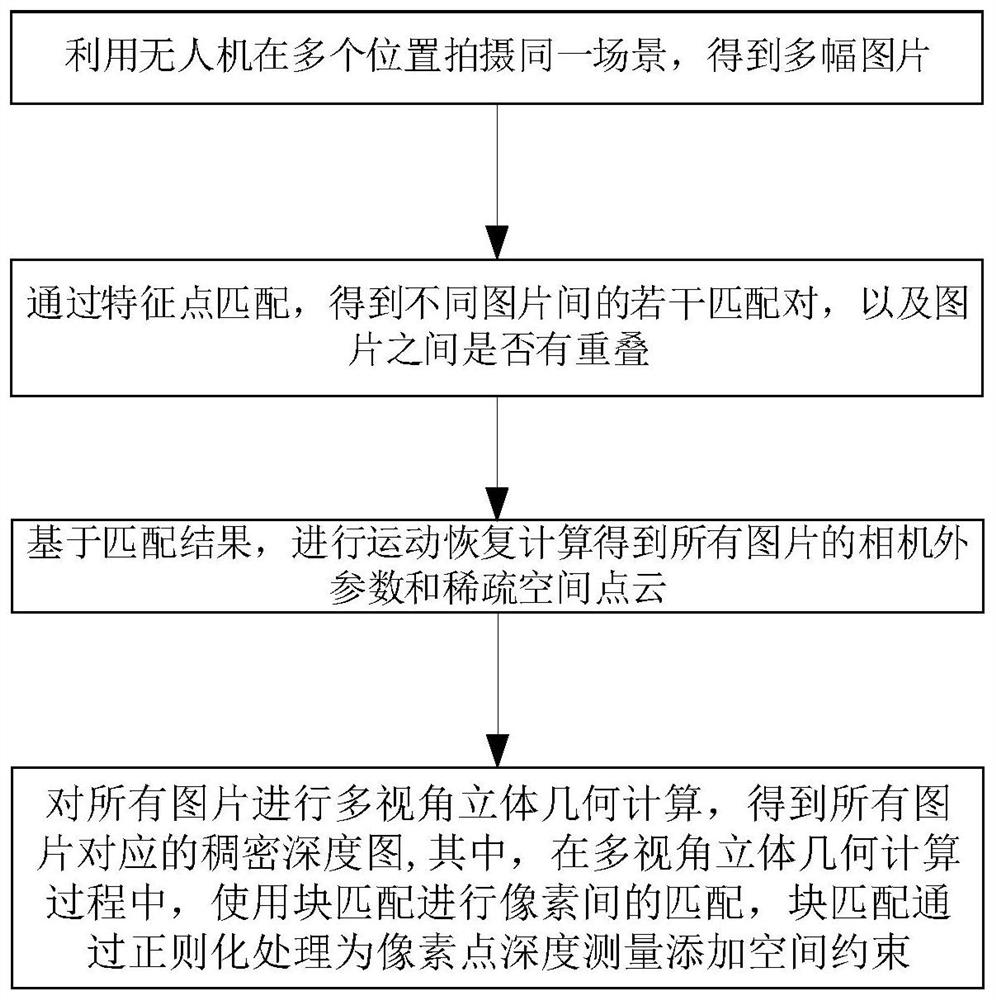
[0057] The present invention provides a depth map acquisition method, figure 1 It is a schematic flow diagram of the method for obtaining a depth map. This method includes:
[0058] Use drones to shoot the same scene in multiple locations and get multiple pictures;
[0059] Through feature point matching, several matching pairs between different pictures are obtained, and whether there is overlap between the pictures;
[0060] Based on the matching results, perform motion recovery calculations to obtain the extra-camera parameters and sparse spatial point clouds of all pictures;
[0061] Perform multi-view stereo geometry calculations on all pictures to obtain dense depth maps corresponding to all pictures;
[0062] Among them, in the process of multi-view stereo geometry calculation, block matching is used to match between pixels, and block matching adds spatial constraints to pixel depth measurement through regularization processing.
[0063] The invention performs spatia...
Embodiment 2
[0113] Embodiment 2 of the present invention provides a depth map acquisition system, Figure 4 Obtain a schematic diagram of the composition of the system for the depth map, the system includes:
[0114] The picture acquisition unit is used to use the unmanned aerial vehicle to shoot the same scene at multiple positions to obtain multiple pictures;
[0115] A feature point matching unit is used to obtain several matching pairs between different pictures through feature point matching, and whether there is overlap between the pictures;
[0116] The motion recovery calculation unit is used to perform motion recovery calculations based on the matching results to obtain the extra-camera parameters and sparse space point clouds of all pictures;
[0117] The multi-view stereo geometry calculation unit is used to perform multi-view stereo geometry calculations on all pictures to obtain dense depth maps corresponding to all pictures;
[0118] Among them, in the multi-view stereo ge...
Embodiment 3
[0127] Embodiment 3 of the present invention provides a method for generating an orthophoto map of an unmanned aerial vehicle, wherein the method includes:
[0128] Use drones to shoot a scene from multiple angles to get multiple pictures;
[0129] Preprocess all images;
[0130] Extract feature points from the preprocessed image, match any two images, determine image pairs with overlapping areas, and obtain feature point matching results;
[0131] Perform motion recovery calculation based on the feature point matching results, and obtain the camera parameters of each picture and the coordinates of the spatial points corresponding to the matching feature points;
[0132] Based on the UAV camera parameters and the coordinates of the spatial points corresponding to the matching feature points, the multi-view stereo geometry calculation is performed to obtain the dense depth map of all pictures; in the process of multi-view stereo geometry calculation, epipolar search and block ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com