


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Indoor unmanned aerial vehicle, control method thereof and computer readable storage medium
A control method and technology of unmanned aerial vehicle, applied in the field of unmanned aerial vehicle, can solve problems such as path planning that cannot be positioned autonomously
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] The indoor drone control method of the present invention can be realized only by drones. A map is pre-stored in the drone, and the map has a plurality of landmark objects and traffic signs, and the landmark objects and traffic signs are configured with specific location information in the map.
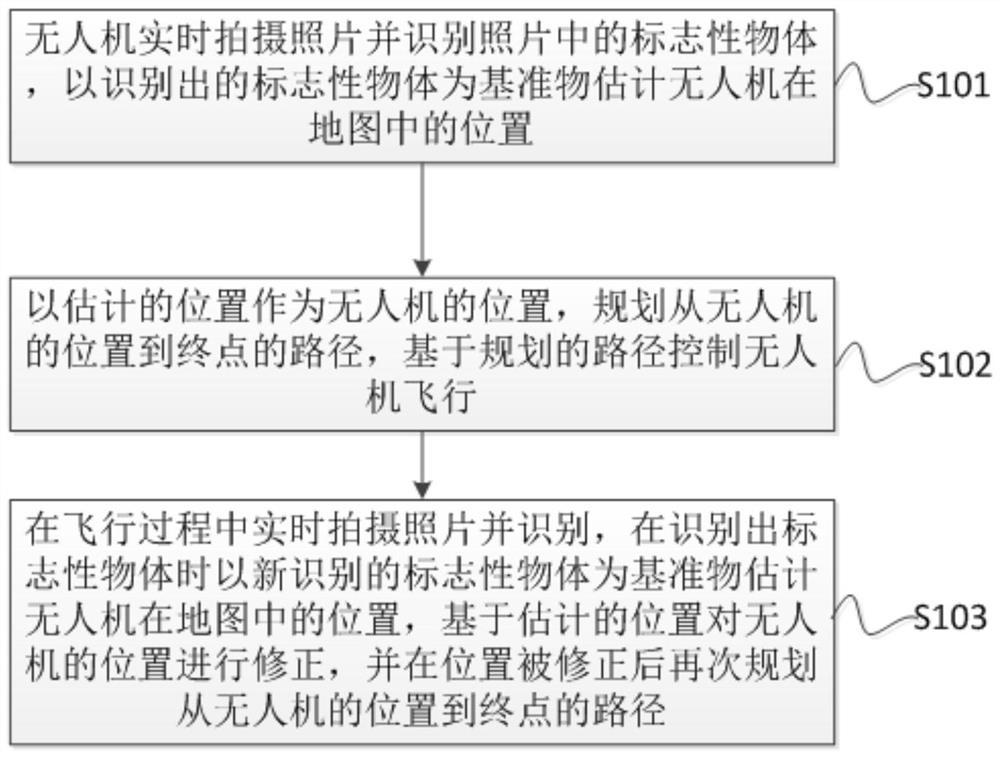
[0040] refer to figure 1 , the method includes:
[0041]S101: The drone takes photos in real time and recognizes landmark objects in the photos, and uses the recognized landmark objects as reference objects to estimate the position of the drone on the map;
[0042] The landmark object may be an easily identifiable object other than a traffic sign, such as a landmark building, and is preferably a two-dimensional code in this embodiment. The two-dimensional code has obvious characteristics in each coordinate direction, which is convenient for accurate identification from all angles. The operating system of the drone is equipped with a special two-dimensional code recognition pac...
Embodiment 2
[0075] Based on the same inventive concept, this embodiment discloses a computer-readable storage medium, which stores a computer program, and when the computer program is executed by a processor, the steps of the method described in the first embodiment are implemented. For a specific implementation process, refer to Embodiment 1, which will not be repeated here.
Embodiment 3
[0077] Based on the same inventive concept, this embodiment discloses an indoor drone, including a processor and a memory, the memory stores a computer program, and when the computer program is executed by the processor, the steps of the method described in Embodiment 1 are implemented . For a specific implementation process, refer to Embodiment 1, which will not be repeated here.
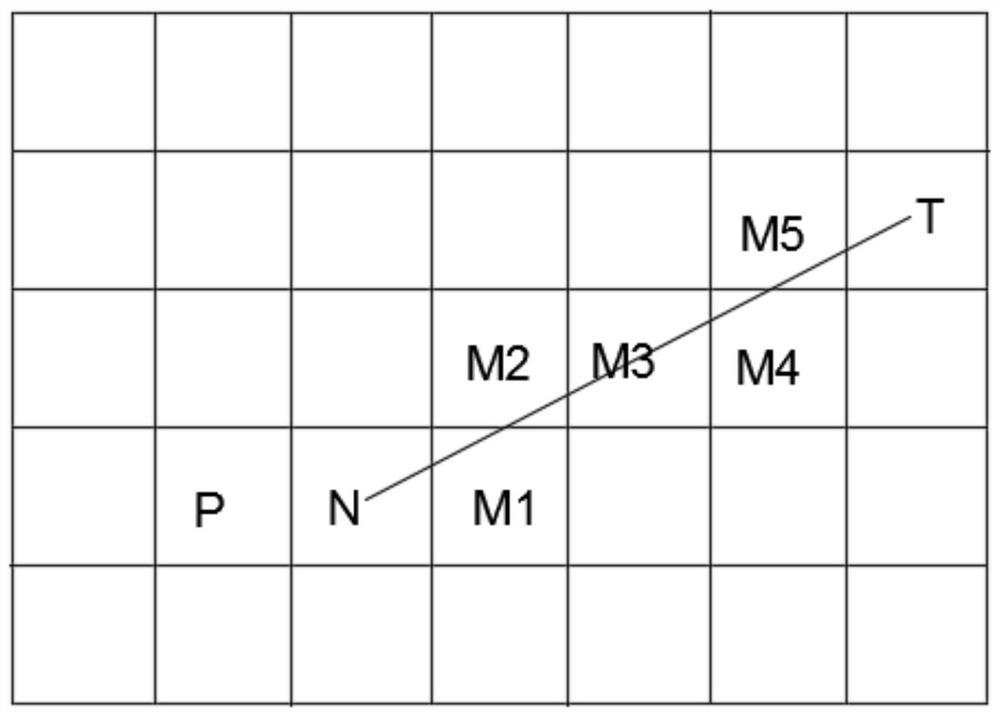
[0078] To sum up, the indoor UAV, its control method, and computer-readable storage medium of the present invention have the following beneficial effects: a map is pre-stored in the UAV in the present invention, and there are multiple landmark objects on the map, so that the control without After the human-machine is turned on, it can take pictures, identify the iconic objects in the photos, and use the identified iconic objects as the reference to estimate the position of the UAV on the map as a starting point, and then plan from the UAV according to the position of the UAV. The path from the pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com