Zero-power hovering system and method for small underwater equipment
A small-scale water and hovering technology, applied in underwater operation equipment, underwater ships, motor vehicles, etc., can solve the problems of weak endurance and large power consumption of underwater robot equipment, reduce the difficulty of design and manufacture, extend the The effect of long service life and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
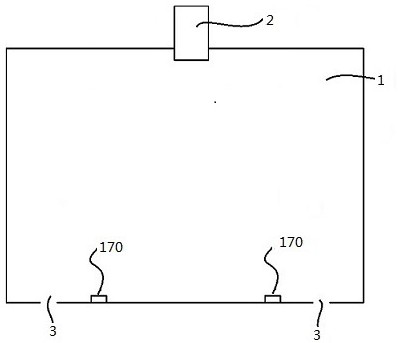
[0029] In this example, if figure 1 and as figure 2 As shown, a zero-power hovering system suitable for small unmanned underwater equipment includes a watertight cabin 1, a water electrolysis module installed inside the watertight cabin 1 for generating gas, and a lift controller to control the movement of the watertight cabin 1 . The top of the watertight chamber 1 is provided with an air vent 2 , and the bottom of the watertight chamber 1 is provided with a water outlet 3 . The lift controller includes a lift control circuit board module and a lift control execution module, and the modules are electrically connected. The lifting control circuit board module includes an attitude angle sensor 110, a single-chip microcomputer 120, and a solenoid valve control circuit 130. The lifting control execution module inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com