Satellite and inertia combined dynamic-to-dynamic real-time precise relative positioning method
A relative positioning and inertial combination technology, applied in satellite radio beacon positioning systems, measuring devices, instruments, etc., can solve the communication pressure and calculation burden without considering centimeter-level relative positioning solutions, data broadcast rate and sampling rate And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
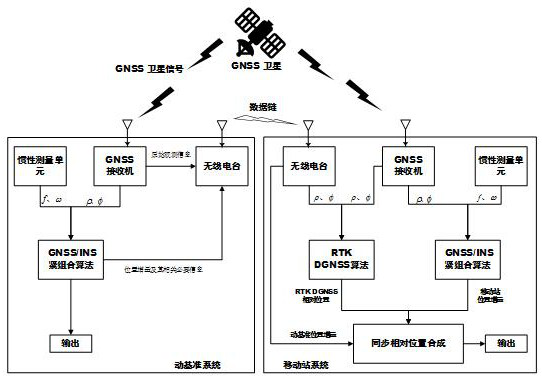
[0068] refer to figure 1 , a kind of satellite and inertial combined moving-to-moving real-time precise relative positioning method comprises the following steps:
[0069] In the first step, the mobile station receiver and the moving reference receiver sample synchronously to obtain the original GNSS observation information, respectively detect and eliminate the fault information gross error of carrier phase cycle slip and pseudo-range observation information in the original GNSS observation information obtained by sampling respectively, and obtain The preprocessed carrier phase and pseudorange observation information of the mobile station receiver and the moving reference receiver.
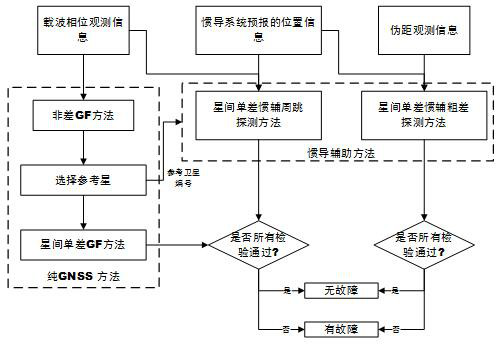
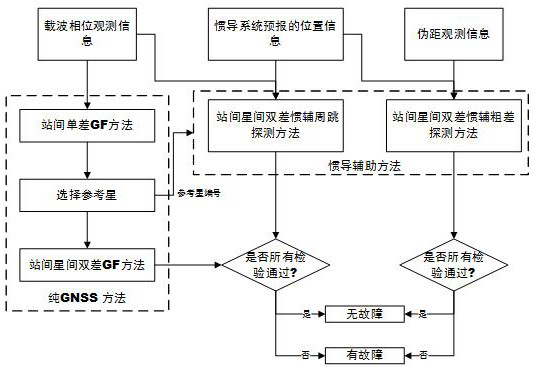
[0070] The invention adopts multiple methods to jointly detect and eliminate faults. Gross errors in GNSS observation data must be monitored and eliminated before being used for relative positioning. Fault information includes carrier phase cycle slip and pseudorange gross error. Carrier phas...
Embodiment 2
[0161] In order to test the method in Example 1, a vehicle-to-vehicle test is carried out in this example. The mobile station and the moving reference are both vehicles and there are many turns when moving on the square. A static reference station is set up at a known location near the test site to calculate the relative positions of the mobile station and the moving reference post-processing respectively. The corresponding results are used to provide reference results for position increments and relative positions. In the test, the GNSS / MEMS prototype system consisting of Sensonor STIM300 MEMS and ComNavOEM-K508 board is fixedly connected to the No. 2 mobile datum of the mobile station. The GNSS receiver can provide observation information of 5 frequency points (B1 / B2 / B3 / L1 / L2) for real-time and post-navigation. In the subsequent analysis, only the observation information of four frequency points (B1 / B3 / L1 / L2) is actually used. The maximum sampling rate of the GNSS receive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com