Decision and control method for autonomous rendezvous and docking of spacecraft in translation approaching stage
A technology for rendezvous, docking, and control methods, which is applied to the docking device of space navigation aircraft, equipment for space navigation, and aircraft for space navigation, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036]The technical solutions in the implementation cases of the present invention will be described more profoundly and completely below. The implementation cases described are partly implementation cases. Users can obtain other implementation cases according to the present invention without paying creative efforts. The "other implementation cases" all belong to the protection scope of the present invention.
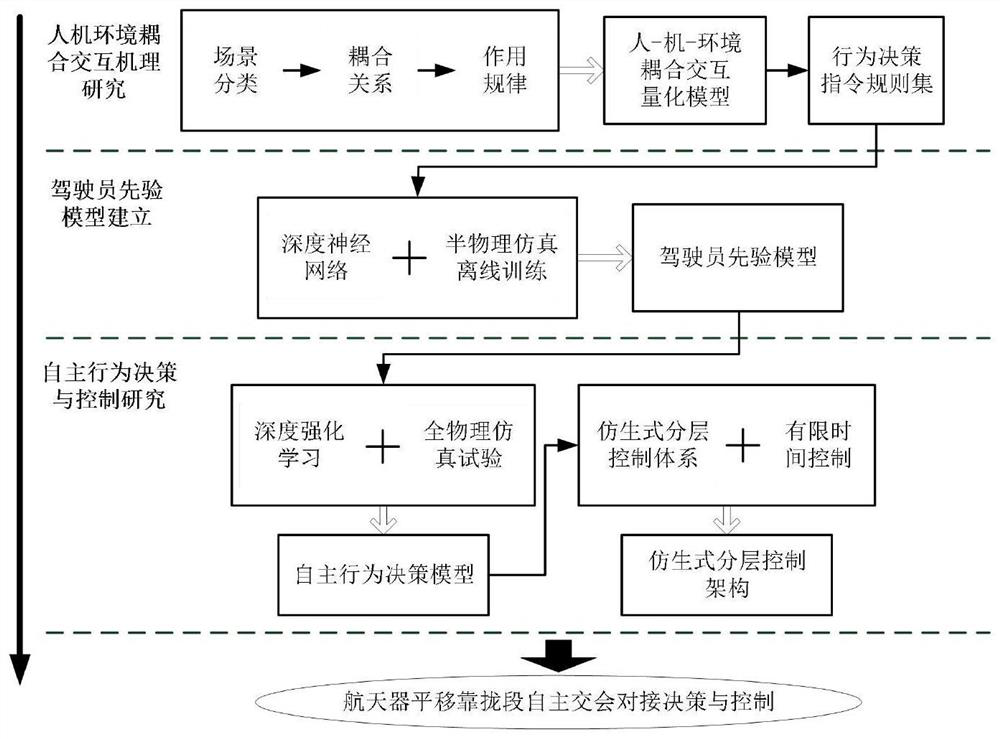
[0037] Such as figure 1 As shown, a decision-making and control method for autonomous rendezvous and docking of a spacecraft translational approaching segment, including the following steps:
[0038] (1) Establish a scene classification matrix for the decision-making of the priority attention dimension, and study the human-machine-environment coupling interaction quantitative model of manual rendezvous and docking in the translational approach segment;
[0039] (2) Analyze the relationship between astronauts, spacecraft, environment and dynamic joint disturbances, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com