Ultrasonic wave range setting method and system
An ultrasonic and range technology, applied in the control/regulation system, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problem that the robot cannot immediately know the exact position of the obstacle, affects the robot's motion efficiency, and the robot is dangerous. , to reduce the risk of collision, increase the safety factor, and avoid the effect of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
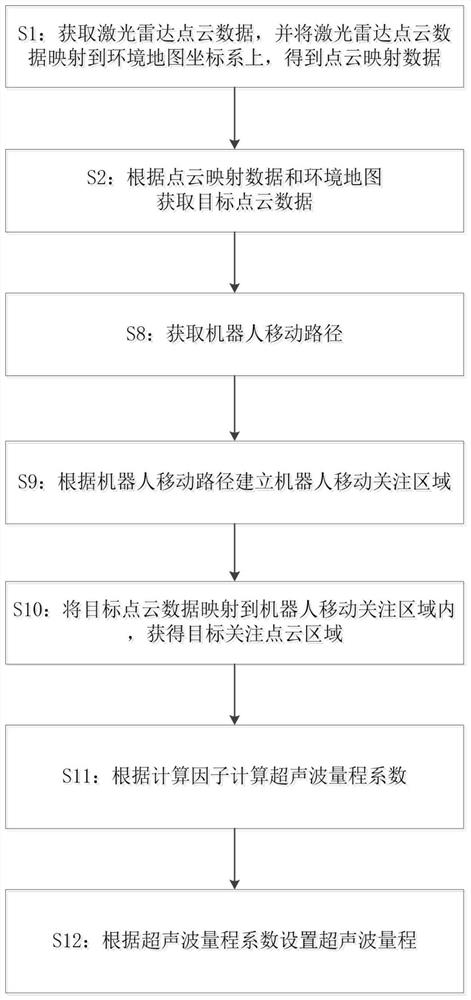
[0057] Such as figure 1 As shown, the present embodiment provides a method for setting the ultrasonic range, including:
[0058] S1: Obtain the lidar point cloud data of the robot's current working environment, and map the lidar point cloud data to the environment map coordinate system to obtain point cloud mapping data;
[0059] S2: Obtain target point cloud data according to the point cloud mapping data and the environment map; the target point cloud data is in a blank area in the environment map and the distance from the fixed obstacle in the environment map is not less than the preset point cloud point cloud of distance;
[0060] S8: Obtain the robot movement path planning of the robot;
[0061] S9: Establishing a robot movement focus area according to the robot movement path planning;
[0062] S10: Map the target point cloud data to the robot movement focus area to obtain the target focus point cloud area;
[0063] S11: Calculate the ultrasonic range coefficient accor...
Embodiment 2
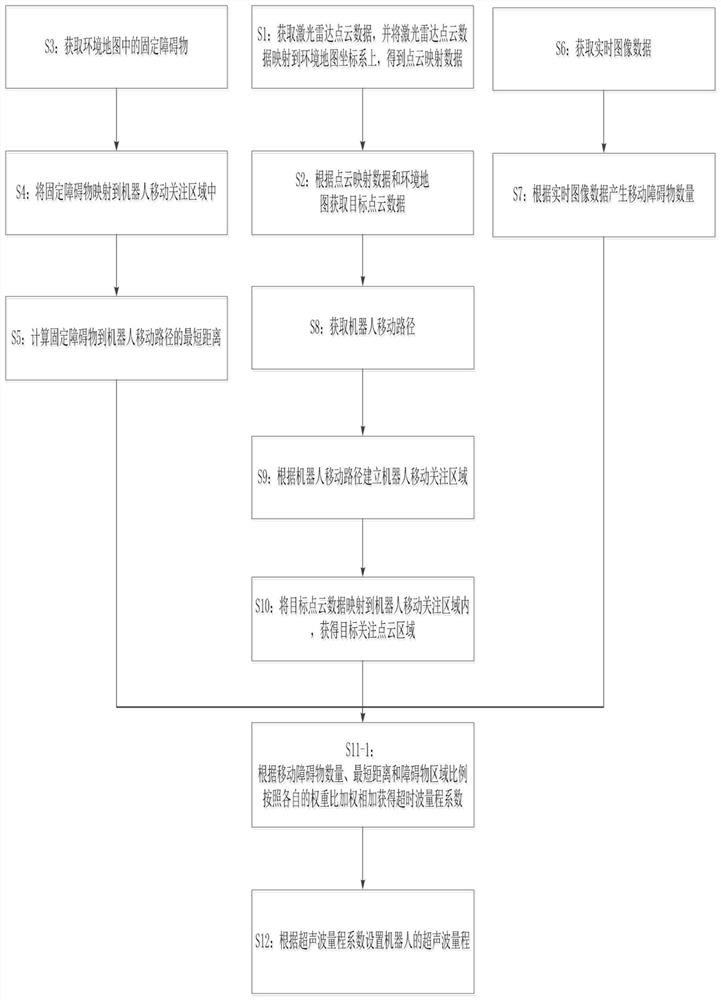
[0068] Such as figure 2 As shown, the present embodiment provides a method for setting the ultrasonic range, and the present embodiment includes:
[0069] S1: Obtain the lidar point cloud data of the robot's current working environment, and map the lidar point cloud data to the environment map coordinate system to obtain point cloud mapping data;
[0070] S2: Obtain target point cloud data according to the point cloud mapping data and the environment map; the target point cloud data is in a blank area in the environment map and the distance from the fixed obstacle in the environment map is not less than a preset point point cloud of cloud distance;
[0071] S3: Acquiring fixed obstacles in the environment map;
[0072] S4: Map the fixed obstacle to the mobile attention area of the robot;
[0073] S5: Calculating the shortest distance from the fixed obstacle to the planned moving path of the robot;
[0074] S6: The calculation factor also includes the number of moving ob...
Embodiment 3
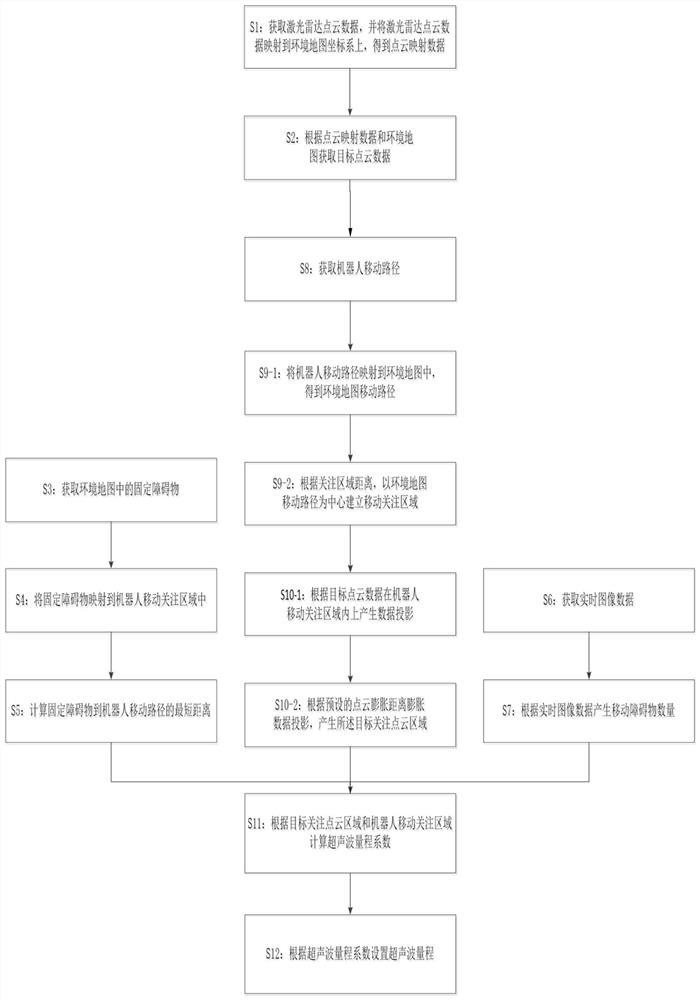
[0085] Such as image 3 As shown, the present embodiment provides a method for setting the ultrasonic range, and the present embodiment includes:
[0086] S1: Obtain the lidar point cloud data of the robot's current working environment, and map the lidar point cloud data to the environment map coordinate system to obtain point cloud mapping data;
[0087] S2: Obtain target point cloud data according to the point cloud mapping data and the environment map; the target point cloud data is in a blank area in the environment map and the distance from the fixed obstacle in the environment map is not less than the preset point cloud point cloud of distance;
[0088] S3: Acquiring fixed obstacles in the environment map;
[0089] S4: Map the fixed obstacle to the mobile attention area of the robot;
[0090] S5: Calculating the shortest distance from the fixed obstacle to the planned moving path of the robot;
[0091] S6: Obtain real-time image data through the camera;
[0092] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com