Inertia/odometer integrated navigation filtering method, electronic equipment and storage medium
An integrated navigation filtering and integrated navigation technology, which is applied in the online smoothing field of inertial/odometer integrated navigation, to achieve the effect of improving navigation positioning accuracy and good filtering robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0074] This embodiment provides an inertial / odometer integrated navigation filtering method, including:
[0075] S1. Based on the data information received by the strapdown inertial navigation and the wheel odometer, an inertial / odometer integrated navigation model based on ST-EKF is established.
[0076] (1) Establish ST-EKF model;
[0077]
[0078] where: g n is the local gravity vector; ∧ represents transforming the vector into an oblique symmetric matrix; is the projection of the speed of the carrier coordinate system relative to the earth's motion in the navigation coordinate system; is the projection of the earth’s rotation angular rate relative to the geocentric inertial coordinate system in the navigation system; φ n with are attitude misalignment angle and velocity error vector, respectively; The projection of the angular velocity generated by the local North East Earth (NED) navigation coordinate system relative to the earth's motion on the local navigati...
Embodiment 2
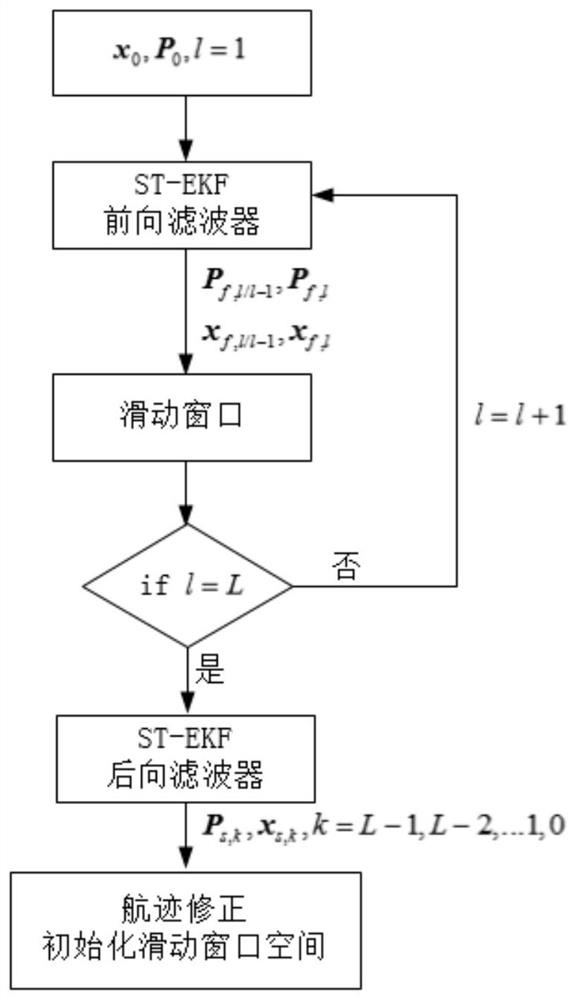
[0134] refer to figure 1 It is a flow chart of the present embodiment, and the present embodiment provides an inertial / odometer combined navigation filtering method, which specifically includes the following steps:
[0135] Step 1, the inertial / odometer integrated navigation system starts to output the data of the strapdown inertial navigation and the wheel odometer. The strapdown inertial navigation system outputs the gyro and meter data of the carrier system (front-right-bottom), takes the North-East-Earth (N-E-D) local geographic coordinate system as the navigation system, and the wheel odometer outputs the instantaneous speed of the vehicle.
[0136] Step 2. Based on the ST-EKF-based inertial / odometer integrated navigation model constructed in Example 1, complete the forward filtering and sliding window data storage of the ST-EKF-based inertial / odometer integrated navigation.
[0137] During the forward filtering process of the system, after each time update and measureme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com