Fast Gaussian particle filter data fusion method based on artificial fish swarm optimization
A Gaussian particle filtering and data fusion technology, applied in the field of signal processing, can solve the problems of shortening the running time, limited use, real-time effect of the algorithm, etc., to reduce the calculation time, improve the filtering accuracy, and be easy to combine.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
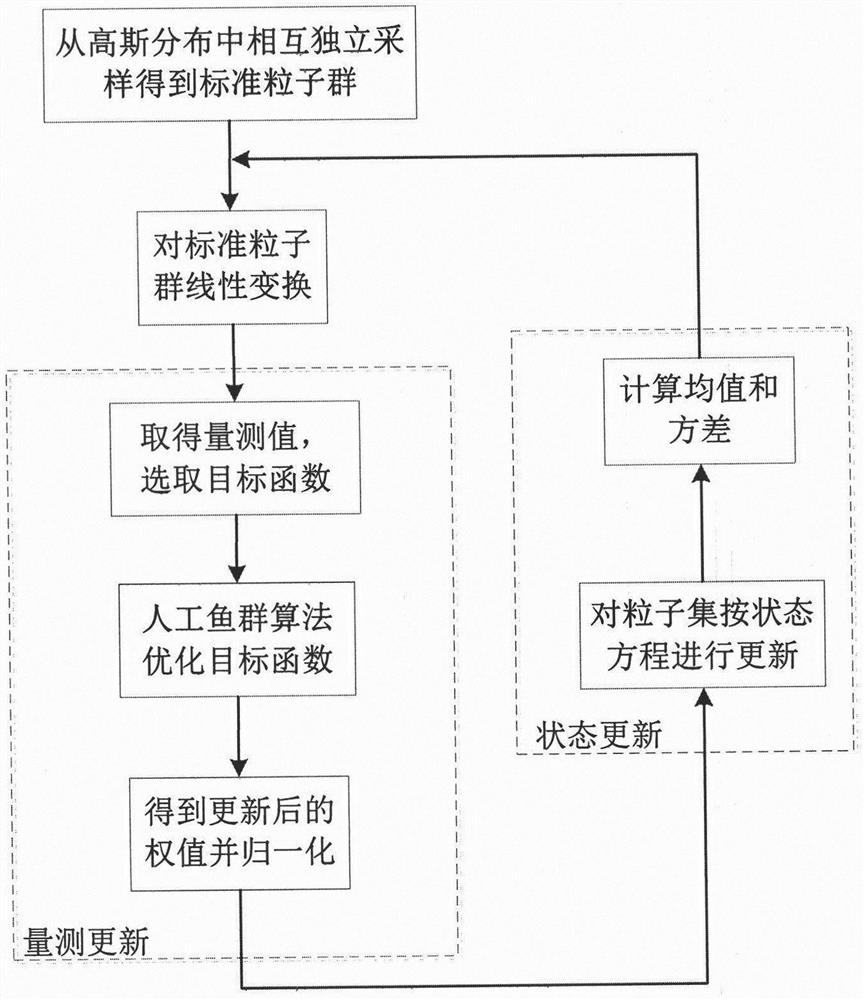
[0042] The following describes the embodiment of the present invention in detail, and this embodiment is exemplary, and is only used to explain the present invention, and should not be construed as limiting the present invention. With reference to the accompanying drawings of the description, a fast Gaussian particle filter data fusion method based on artificial fish swarm optimization of the present invention is described in detail as follows:
[0043]Using a one-dimensional strongly nonlinear model, its model function can be written as follows:
[0044]
[0045]
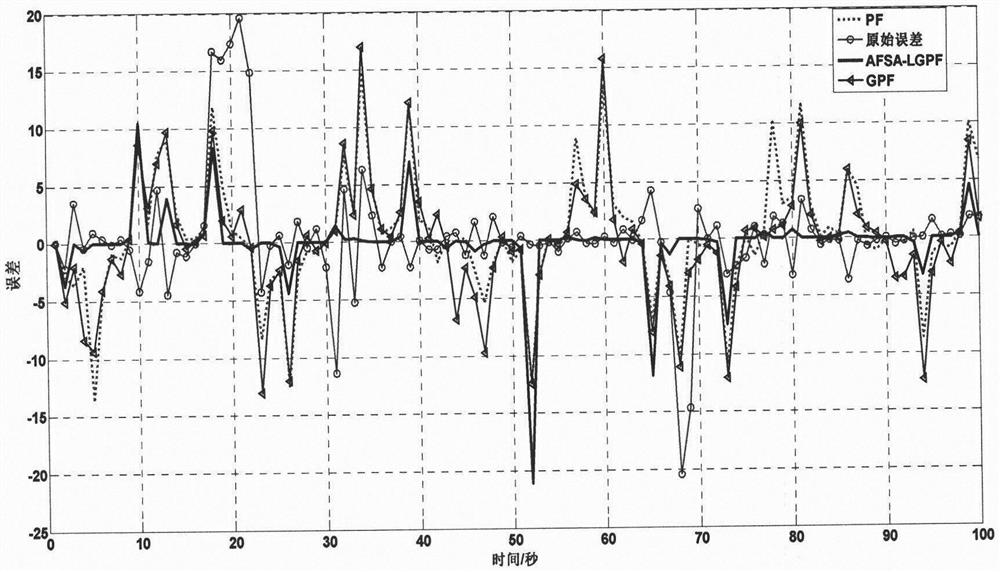
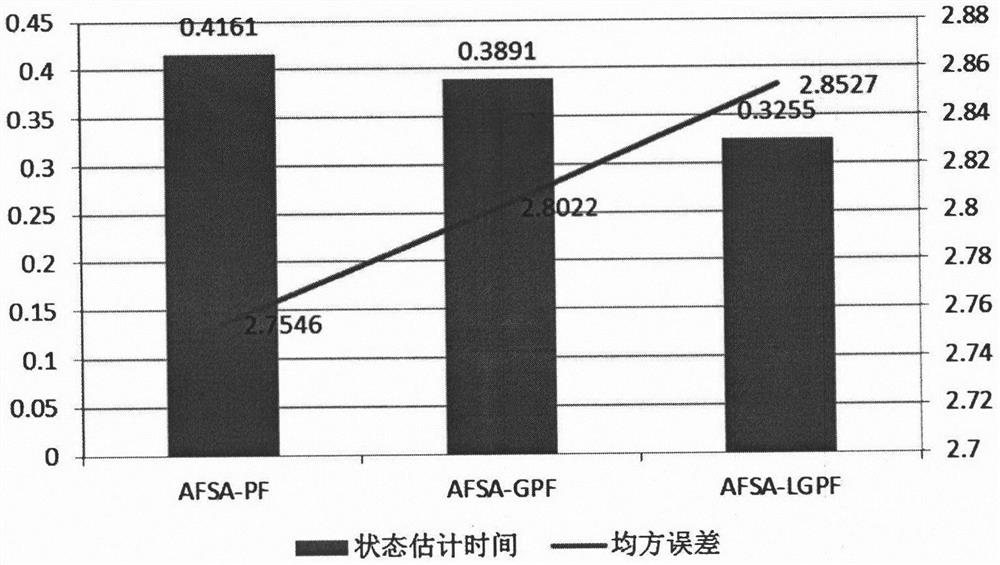
[0046] The simulation experiment environment and related parameters are as follows: the simulation software is MATLAB, the hardware environment is Intel i5-6500, the maximum main frequency is 3.20GHz, and the running memory is 7.87GB. u k and v k are independent white noise variables, Total simulation time N=100, number of particles M=1000, time interval T=0.01s, number of artificial fish fishnum=50; ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com