


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
All-electric drive distributed unmanned vehicle motion simulation platform and design method thereof
A technology of motion simulation and simulation platform, applied in the fields of electrical digital data processing, instrumentation, geometric CAD, etc., can solve the problem of kinematics model research without scholars, inconvenient upper-level trajectory planning and tracking algorithm research, and the inability to realize 4-wheel independent drive/control Dynamic/steering simulation and other issues to achieve good speed stability and mechanical response characteristics, small turning radius, maintain speed stability and mechanical response characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
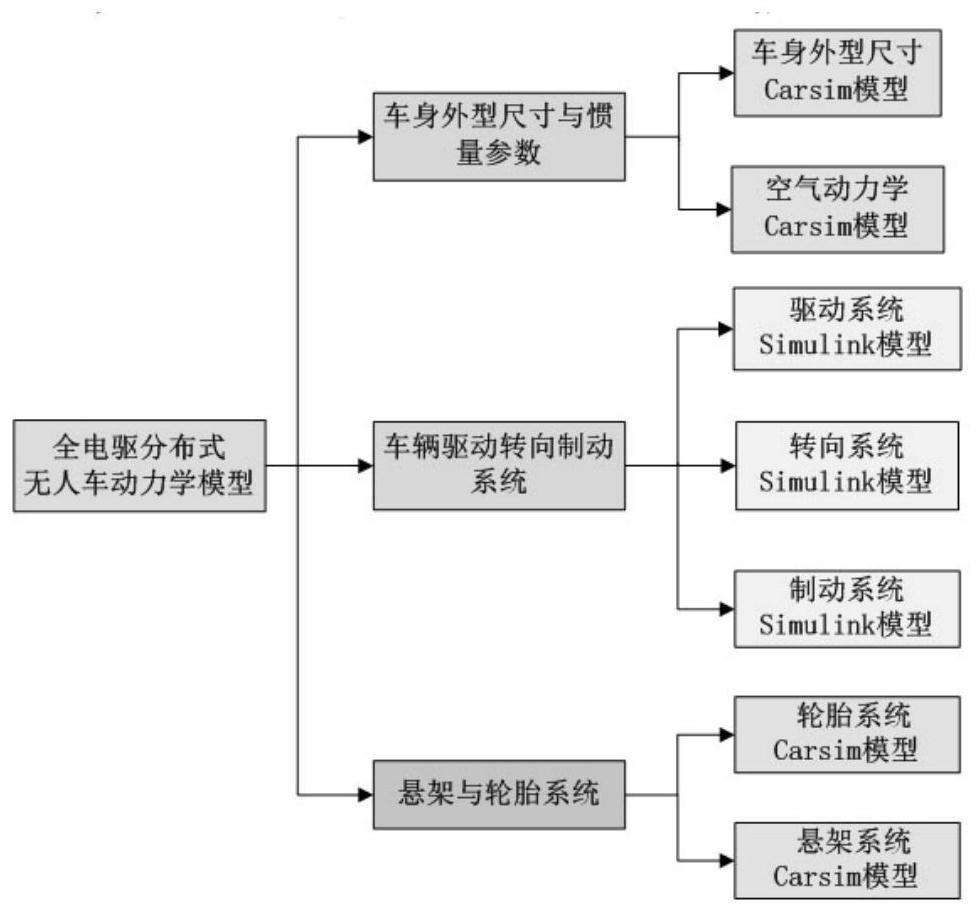
[0038] Such as figure 1 As shown, the present invention proposes an all-electric drive distributed unmanned vehicle motion simulation platform, which is established by the joint simulation of Carsim and Simulink, including the body shape model, aerodynamic model, tire and suspension model created by Carsim. System model and drive system model, steering system model, brake system model created by Simulink.
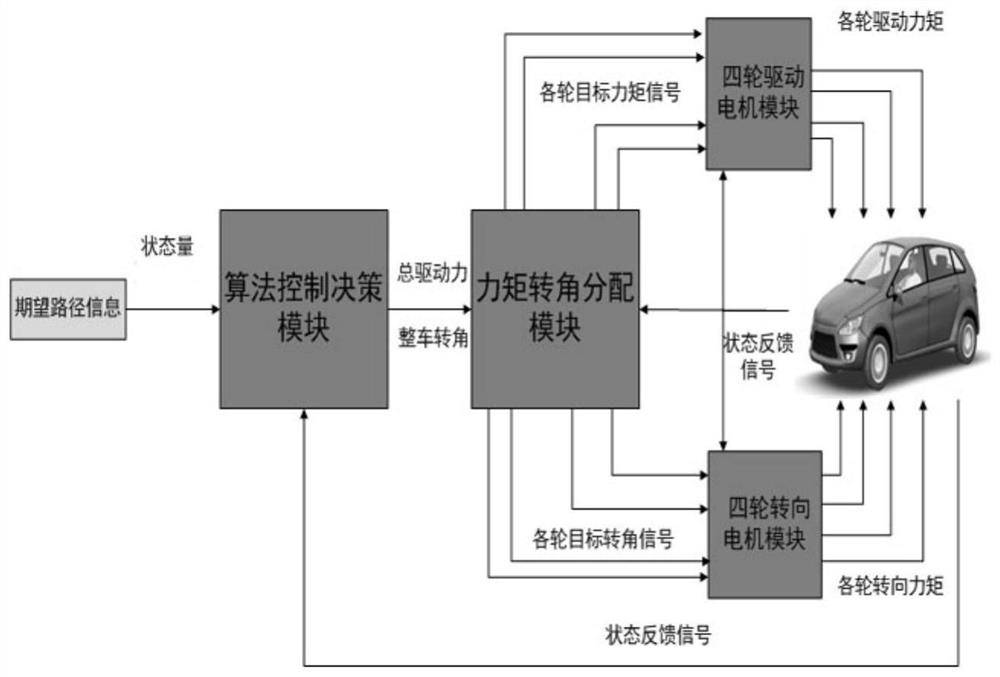
[0039] Specifically, as figure 2As shown, the simulation platform mentioned in this embodiment is a four-wheel independent drive simulation platform, which includes a simulation module under the MATLAB / Simulink environment, and the simulation module includes a driver control module, a control algorithm decision module, and four drive motor integration module, four steering motor integration modules, and Carsim S-Function module; each drive motor integration module and steering motor integration module act on each individual wheel; the two ends of the Carsim S-Function mod...
Embodiment 2
[0049] In this embodiment, a four-wheel Ackerman steering kinematics model is proposed, and the four-wheel Ackermann steering kinematics model is set in the moment-rotation-angle distribution module described in Embodiment 1. The principle of Ackermann steering is mainly to solve the problem of excessive wear of the wheels during the steering movement of the vehicle. The main way is: the inner and outer wheels of the vehicle must make a circular motion around an instantaneous center when turning, so as to ensure that the wheels and the ground are in pure rolling There is no slippage phenomenon to achieve smooth turning of the vehicle. The traditional two-wheeled Ackerman steering vehicle uses a connecting rod structure to make the steering angle of the inner wheel larger than the steering angle of the outer wheel by 2 to 4 degrees during steering, and make the four wheels The rotation center of the wheel is located on the extension line of the rear axle, and the line connecting...
Embodiment 3
[0066] In this embodiment, a path and kinematics model of an all-electric drive distributed unmanned vehicle is proposed. The path and kinematics model includes upper-level kinematics that can map the vehicle position and heading angle state quantities from the vehicle speed and front axle angle. model, and the lower-level kinematics model that can map the vehicle speed and the front axle steering angle to the respective four-wheel speeds and four-wheel steering angle control quantities, wherein the lower-level kinematics model is based on the four-wheel Ake described in Embodiment 2 The Mann steering model is established; wherein the upper layer kinematics model is set in the algorithm control decision module with the algorithm described in Example 1.
[0067] Such as Figure 15 As shown, the upper kinematics model is as follows, under the inertial coordinate system OXY, (X r ,Y r ), (X f ,Y f ), (X G ,Y G ) are the coordinates of the rear axle, the front axle axis and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com