


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A scanning trajectory planning method for a photographic three-dimensional scanner
A scanning trajectory and scanner technology, applied in the field of 3D scanning, can solve the problems of lack of scanning trajectory planning methods for photographic 3D scanners, inability to support automatic operation of equipment, and low acquisition efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] A scanning trajectory planning method for a photographic three-dimensional scanner, mainly comprising the following steps:
[0052] Step S1: Calibrate the actual single-frame effective range 1.8;
[0053] Step S2: solving the flattest envelope direction 2.4 of the surface to be measured 2.1;
[0054] Step S3: solving the initial guiding line 3.1 and the primary guiding line 3.2;
[0055] Step S4: Solve the initial node 4.1 and the measurement direction at the initial node 4.1;
[0056] Step S5: splicing inspection and correction of the adjacent initial node 4.1 on the initial guiding line 3.1;
[0057] Step S6: solving the secondary guiding line 6.1, the secondary node 6.2 and their measurement directions;
[0058] Step S7: Splicing inspection and correction of adjacent secondary nodes 6.2 on each secondary guiding line 6.1;
[0059] Step S8: Splicing inspection and correction of adjacent secondary nodes 6.2 on each primary guiding line 3.2;
[0060] Step S9: Inver...
Embodiment 2
[0065] A scanning trajectory planning method for a photographic three-dimensional scanner, mainly comprising the following steps:
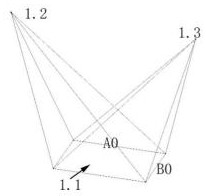
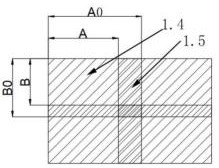
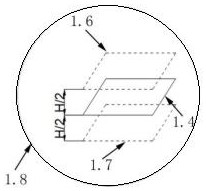
[0066] Step S1: if Figure 1-3 As shown, calibrate the actual single effective range of 1.8; respectively adjust the distance between the two photos along the length A0 and width B0 directions of the single photo range 1.1 of the photographic 3D scanner, and observe whether the two photos can be spliced , the maximum distance that can be spliced in the direction of length A0 and width B0 of a single photo range of 1.1 is length A and width B, the depth of field of the 3D scanner is the height H, and the focal point of the 3D scanner is the center of symmetry, the range of the cuboid is obtained as The actual single-frame effective range of the calibrated 3D scanner is 1.8;
[0067] Step S2: if Figure 4 As shown, solve the flattest envelope direction 2.4 of the surface to be tested 2.1, and solve two planes that are parallel to each other and ...
Embodiment 3
[0088] A scanning trajectory planning method for a photographic three-dimensional scanner, mainly comprising the following steps:
[0089] Such as Figure 1-3 As shown, the photographic 3D scanner can solve the spatial point cloud of a curved surface within a certain range through at least two cameras, that is, the first camera 1.2 and the second camera 1.3, and this range is a single photo of the photographic 3D scanner Range 1.1 (length*width*height=A0*B0*H). The range 1.1 of a single photo of a photographic 3D scanner is generally smaller than the size of the surface to be measured 2.1 of the part, so multiple single images are required for splicing, and the range 1.1 between two adjacent single photos taken by multiple frames must be If there is a minimum splicing intersection area of 1.5, then the range of a single photo minus 1.1 is the effective range of a single frame at the actual focal plane of 1.4; if the depth of field of the camera is set to H, then the upper a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com