A shell welding system and method for corn harvesting and returning machine
A welding system and harvesting technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., to achieve the effect of ensuring mobility, improving product quality and stability, and improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
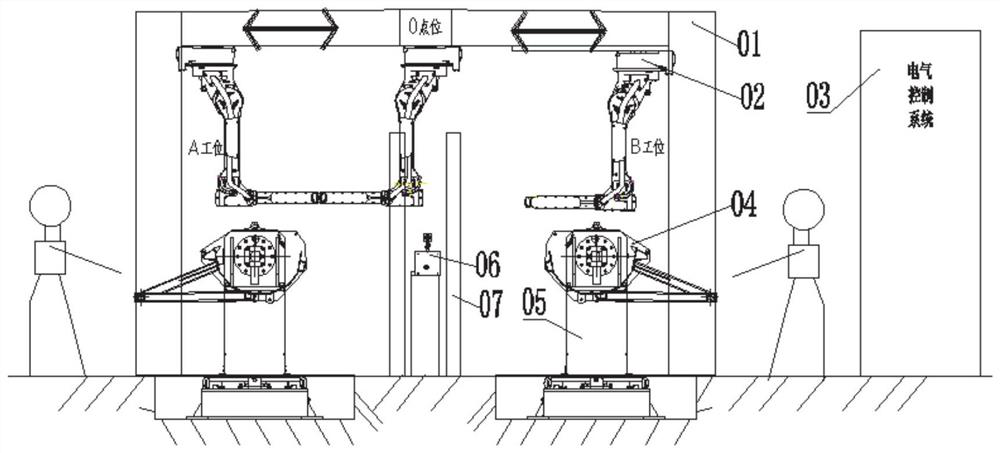
[0053] Such as Figure 1-Figure 8 As shown, Embodiment 1 of the present disclosure provides a robot welding system for the casing of the corn harvester returning to the field, including two sets of six-axis robots 02, two sets of welding robot systems 11, a set of double longitudinal beam gantry robot suspension devices 01, Two sets of single-axis head and tail frame adjustable positioner system 05, two sets of tooling fixtures, electrical control system 03, two sets of lifting anti-arc devices 07, and a set of gun cleaning and wire cutting device 06;
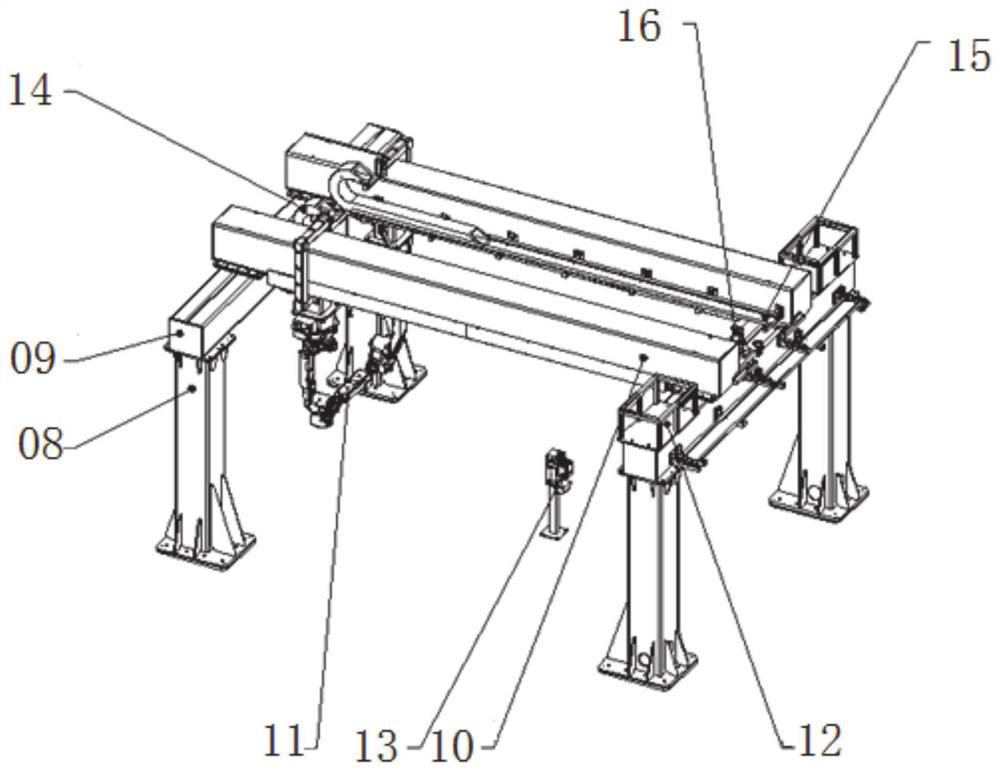
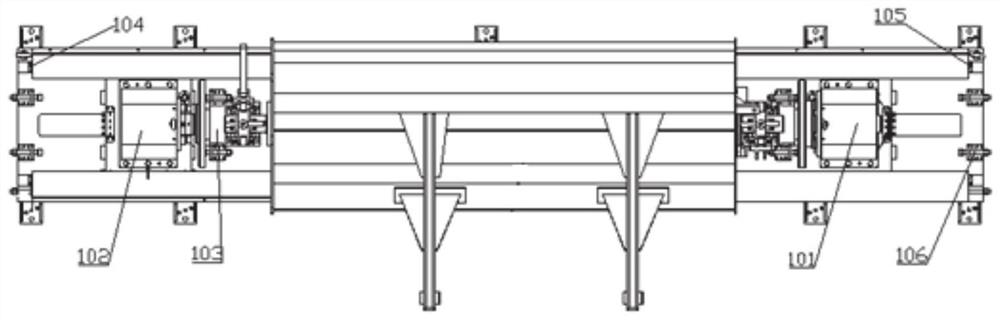
[0054] The double-longitudinal gantry robot suspension device 01 includes two sets of longitudinal beams 10 above the gantry, which are installed on two gantry crossbeams 09, and the crossbeams are installed on four gantry columns 08.
[0055] The lower surface of the longitudinal beam 10 is provided with slide rails, sliders and racks, the robot moves on the longitudinal beam 10 through servo motors and gear drives, and the robo...
Embodiment 2
[0079] Embodiment 2 of the present disclosure provides a working method of a welding system for a corn harvesting and returning machine housing. Using the welding system described in Embodiment 1 of the present disclosure, taking two sets of robots as an example, the following steps are included:
[0080] When the system is started, the robot is at the 0 o'clock position, and the worker is loading the piece at station A;
[0081] Start the system, and the two sets of robots move from 0 to station A at the same time to perform automatic welding operations. At this time, workers are loading parts at station B;
[0082] After the operation of station A is completed, the two sets of robots move to the 0 point at the same time. After waiting for the start of station B, the two sets of robots move to station B at the same time for automatic welding operations. Blank parts, so cycle.
[0083] The two robots use the signal interlock function to prevent collisions when the robots move...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com