Oil-immersed transformer internal inspection robot and control system and method
An oil-immersed transformer and inspection robot technology, applied in the field of robotics, can solve problems such as difficult to control the motion performance and balance stability of the sphere, unfavorable depth accurate positioning and fixed depth shooting, and lack of left and right movement functions, etc. Achieve the effect of high internal space utilization, low cost and high mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
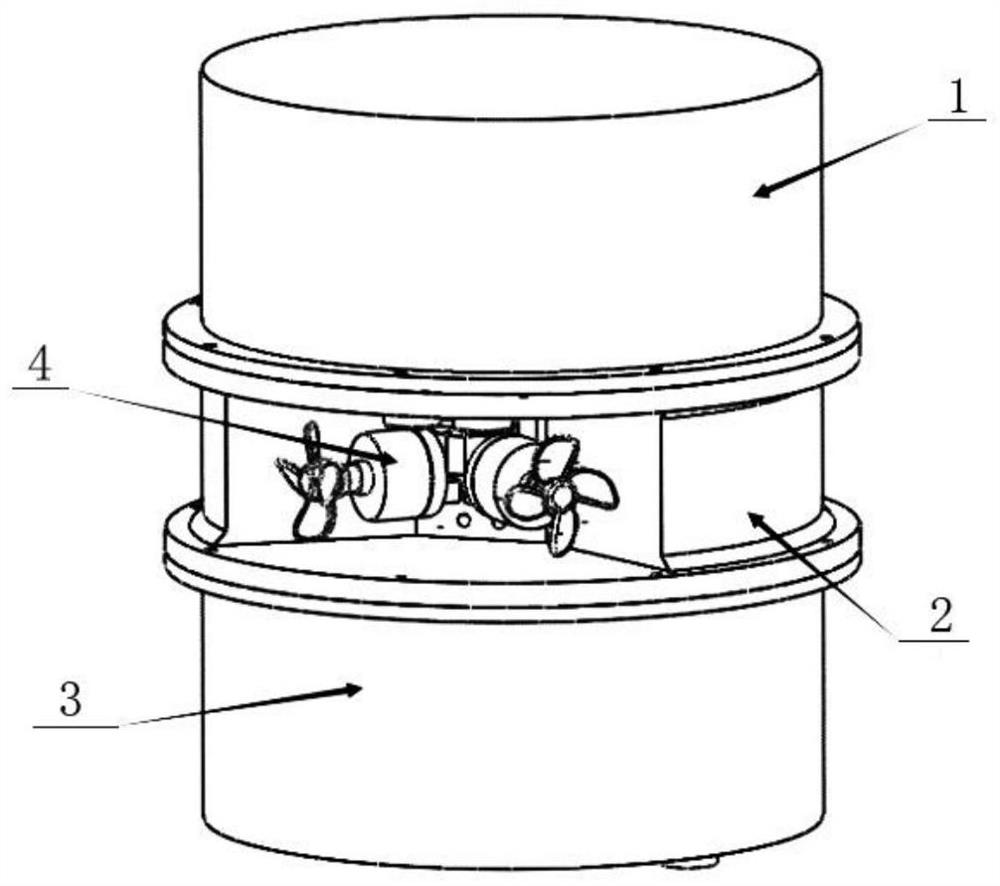
[0038] Such as figure 1 As shown, it is a schematic diagram of the overall appearance structure of the robot in the embodiment of the present invention; figure 2 Shown is a schematic diagram of the internal structure of the robot of the embodiment of the present invention. An internal inspection robot of an oil-immersed transformer, comprising: a variable-volume upper / middle / lower three-section combined sealed cylindrical shell, and the sealed cylindrical shell includes: an upper shell 1, a middle shell Body 2, lower shell 3. The upper casing 1, the middle casing 2 and the lower casing 3 of the robot are fixedly connected by sealing rings and bolts to form a sealed cylinder.
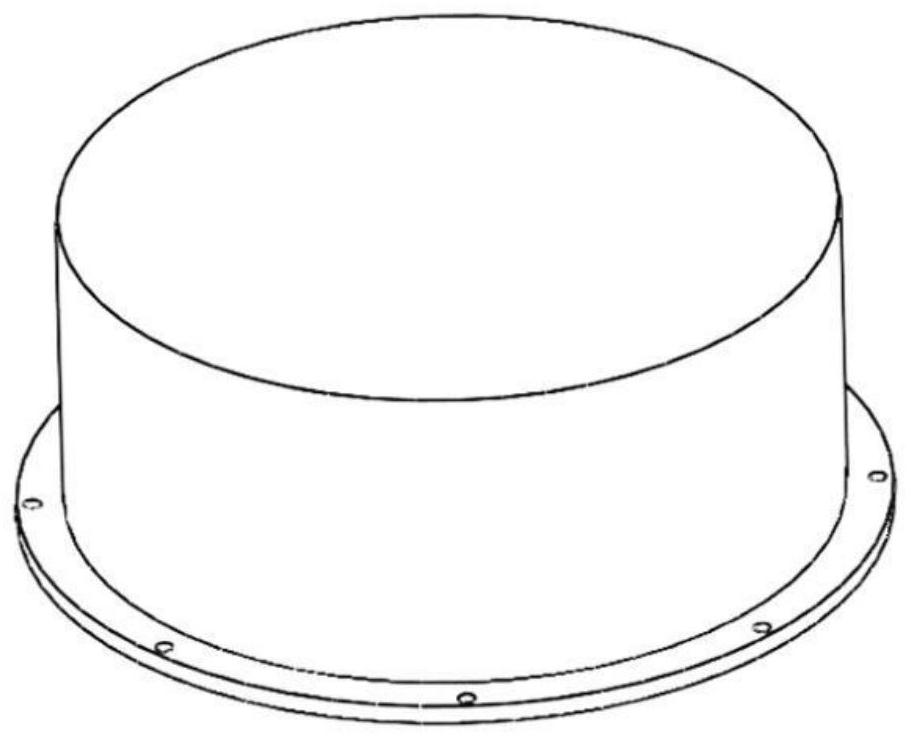
[0039] Such as image 3 Shown is a perspective view of the upper casing of the robot of the embodiment of the present invention. The upper casing 1 of the robot is a cylind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com