A three-dimensional laser target sphere center fitting method based on weight selection iterative wolf pack algorithm
A wolf pack algorithm and weight selection iteration technology, which is applied in the field of 3D laser target ball center fitting based on the weight selection iteration wolf pack algorithm, and can solve the problem of no wolf pack algorithm application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0057] like figure 1 As shown, the present invention proposes a three-dimensional laser target ball center fitting method based on the weight selection iterative wolf pack algorithm. In this paper, the wolf pack algorithm WPA is combined with the weight selection iteration (WI) to introduce the target ball center Fitting, and based on the data characteristics of the center of the target ball, MWIWPA was constructed. The idea of this method to fit the center of the target ball is to weaken or even eliminate the influence of outliers through weight selection iterations, and to determine the parameters through WPA fitting. The weighted initial value of WI, which is closer to the true value, reduces the influence of outliers while making full use of the suspicious segment data of WI.
[0058] Specifically, in an embodiment of the present invention, the method includes:
[0059] Step S1, the combination of wolf pack algorithm WPA and weight selection iteration, introduce target ...
Embodiment 2
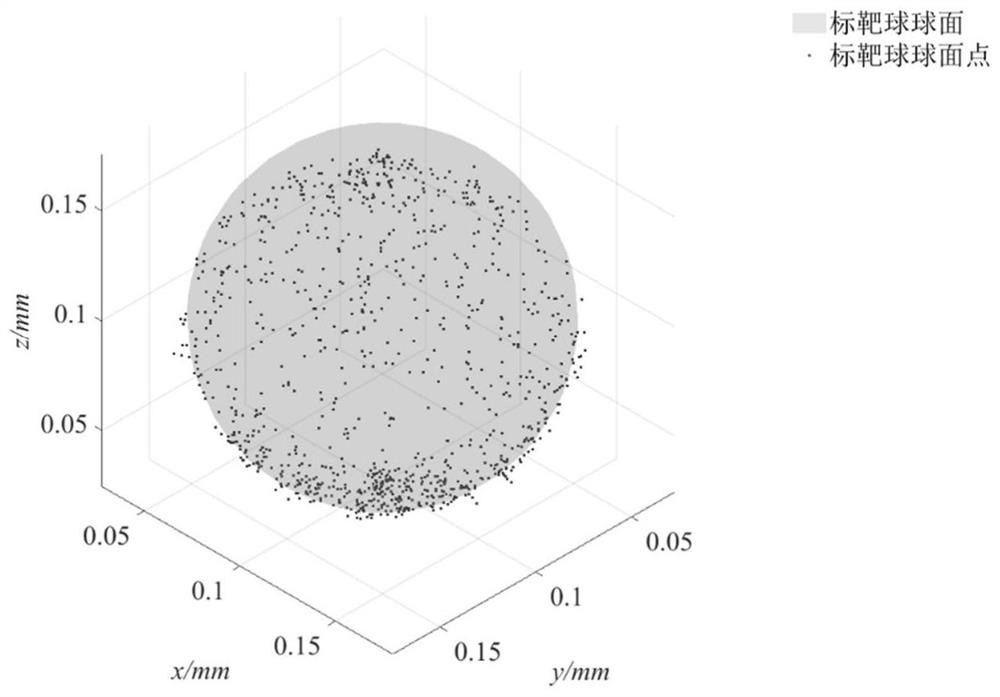
[0114] like figure 2 As shown, use MATLAB to simulate the center of the target ball to fit the data, assuming that the equation of the target ball is:
[0115] (x-0.1) 2 +(y-0.1) 2 +(z-0.1) 2 =0.0725 2 (15)
[0116] In actual scanning, the 3D laser scanner can only obtain the point cloud data of half the target sphere, so the restrictions on the above sphere equation are as follows:
[0117] y>-x+0.2 (16)
[0118] In order to simulate the spherical point data of the target sphere, 1000 points are randomly selected on the half of the target sphere constructed by formulas (15) and (16), and the measurement error is set to obey the positive state distribution, and then add the measurement error to the x, y and z coordinates of the above points respectively, and simulate the spherical point data of the target as figure 2 shown. Considering that there are outliers (non-target spherical points) in the fitting data of the center of the target ball, the distance between the...
Embodiment 3
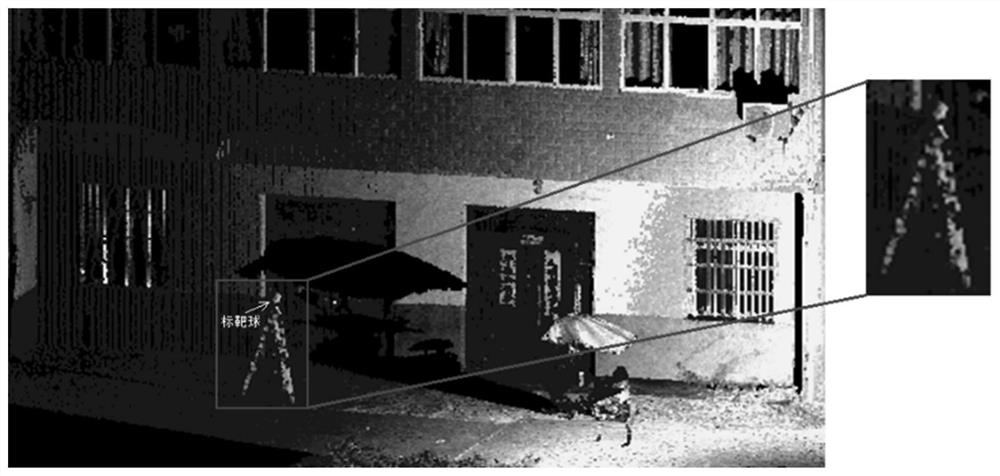
[0124] In this paper, Hi-Target HS650 high-precision three-dimensional laser scanner is used for experimental data collection. Hi-Target HS650 high-precision 3D laser scanner adopts full waveform measurement technology, which can output multiple echoes; the distance measurement method is pulse type, the maximum distance measurement is 650m, the minimum distance measurement is 1.5m, and the distance measurement accuracy can reach 5mm per 100 meters. ;Laser divergence is less than 0.14mrad; panoramic resolution is greater than 70 million pixels, horizontal and vertical angular resolution are both 0.001°; scanning range is horizontal 0~360°, vertical -40~60°; scanning speed is horizontal 3~ 150 lines / s, the fastest horizontal is 36° / s, and the data acquisition speed is up to 500,000 points / s.
[0125] The site of the experiment in this paper is located in Guqiao Mine, Huainan, China. During the experiment, the target ball was scanned multiple times. The scanning time was about 40...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com