Method and device for controlling dust collection of cleaning robot, equipment and medium
A cleaning robot and dust collection technology, applied in cleaning devices, cleaning equipment, cleaning machinery, etc., can solve the problem of untimely cleaning of dirt and achieve timely and accurate cleaning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0050] see figure 1 , the embodiment of the present application provides a method for controlling dust collection by a cleaning robot, including:
[0051] Step S101, detecting the dust collecting state of the cleaning robot.
[0052] Wherein, the dust collection state is used to indicate whether the cleaning robot currently needs to start the dust collection function.
[0053]In practice, the above-mentioned dust collection state may generally include at least one sub-state, for example, the mop sub-state used to indicate whether the use time of the mop of the cleaning robot exceeds the first preset time length, and whether the use time of the drum of the cleaning robot is The sub-state of the drum exceeding the second preset duration, etc. Wherein, the first preset duration and the second preset duration may be the same or different.
[0054] The above-mentioned dust collection function is usually a function for removing dirt accumulated by the cleaning robot. In practice...
Embodiment 2
[0062] The embodiment of this application provides a method for controlling dust collection by a cleaning robot. This embodiment is a further description of Embodiment 1. For the same or similar places as Embodiment 1, please refer to the relevant description of Embodiment 1 for details. Here I won't repeat them here. see figure 2 , the method for controlling dust collection by a cleaning robot in this embodiment includes:
[0063] Step S201, detecting the dust collecting state of the cleaning robot.
[0064] Wherein, the dust collection state is used to indicate whether the cleaning robot currently needs to start the dust collection function.
[0065] Step S202, receiving base station status information of a base station communicatively connected with the cleaning robot.
[0066] Among them, the base station can be adapted and docked with the cleaning robot, and the status information of the base station is used to describe the current status of the base station.
[0067...
Embodiment 3
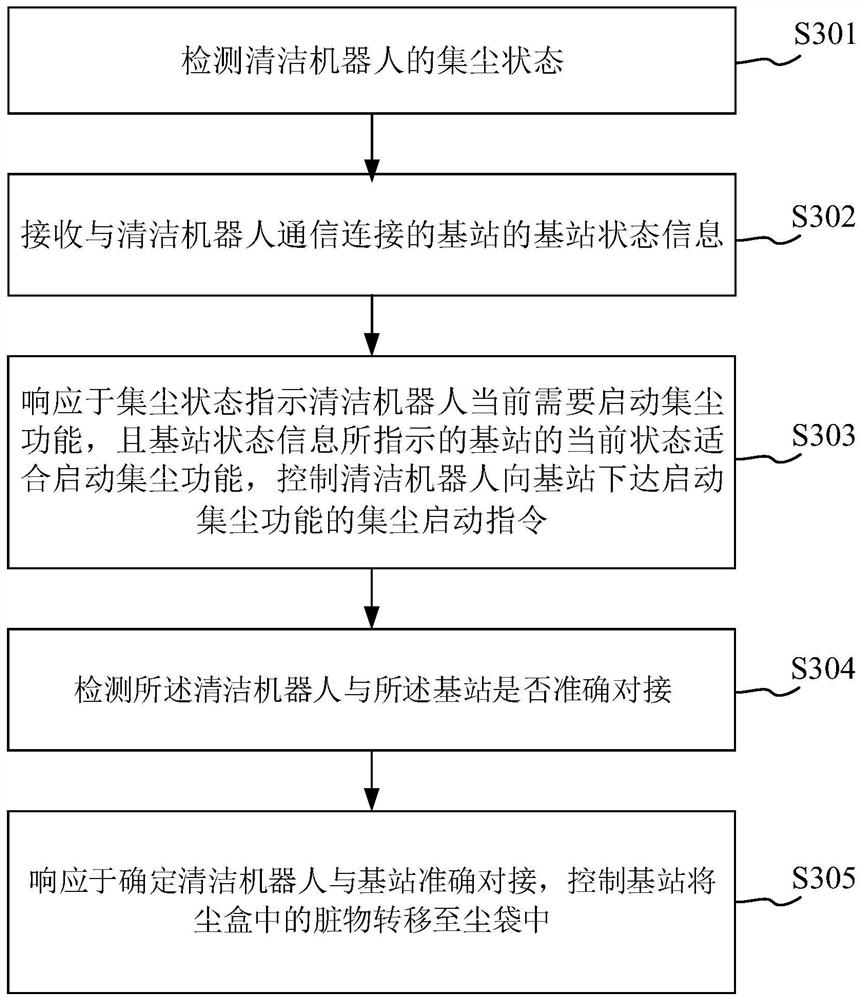
[0073] The embodiment of this application provides a method for controlling dust collection by a cleaning robot. This embodiment is a further description of Embodiment 2. For the same or similar places as Embodiment 2, please refer to the relevant description of Embodiment 2 for details. Here I won't repeat them here. see image 3 , the method for controlling dust collection by a cleaning robot in this embodiment includes:
[0074] Step S301, detecting the dust collecting state of the cleaning robot.
[0075] Wherein, the dust collection state is used to indicate whether the cleaning robot currently needs to start the dust collection function.
[0076] Step S302, receiving base station status information of a base station communicatively connected with the cleaning robot.
[0077] Wherein, the base station can be adapted and docked with the cleaning robot, and the status information of the base station is used to indicate the current status of the base station.
[0078] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com