Snakelike water surface rescue robot and control method thereof
A technology for rescue robots and rescue personnel, which can be applied to water lifesaving, instruments, ships, etc. It can solve the problems of self-safety, reduced staff strength, and vulnerability to weather, etc., to achieve automatic rescue and improve timeliness , using a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
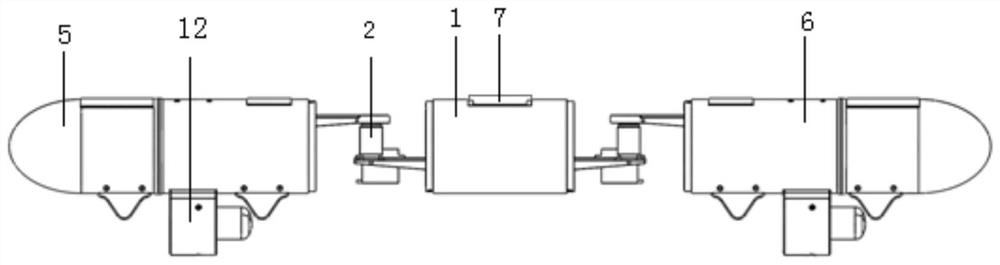
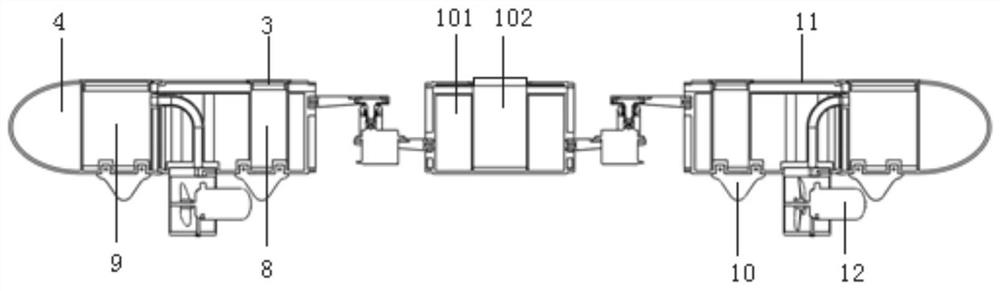
[0026] Such as Figure 1 to Figure 5 As shown, a snake-shaped surface rescue robot includes a front segment 5 of a snake-shaped body, a middle segment 1 of a snake-shaped body, and a rear segment 6 of a snake-shaped body. The front segment 5 of the serpentine body is connected with the rear segment 6 of the serpentine body.
[0027] The middle section 1 of the serpentine body includes a middle shell, the top of the middle shell is provided with a middle hatch 7, and the middle hatch 7 is provided with a start switch, and a middle sealed compartment 101 is formed inside the middle shell, and is sealed in the middle. Both sides of the cabin 101 are provided with line pipeline ports, and the middle part of the middle sealed cabin 101 is the controller cabin 102. The controller, buzzer, wireless communication module and image transmission module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com