Unstructured road vehicle path planning method
A technology for road vehicle and path planning, applied in vehicle position/route/altitude control, motor vehicle, non-electric variable control, etc. Problems around the type, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below in conjunction with the embodiments given in the drawings.
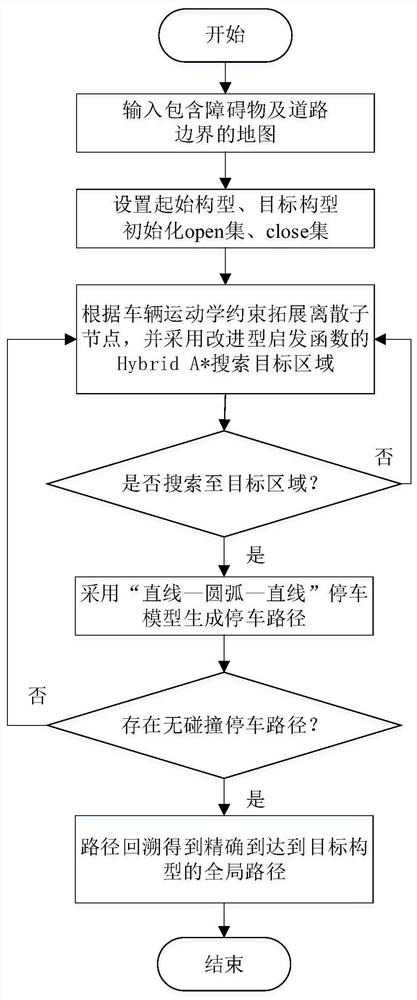
[0057] Such as figure 1 As shown, the main steps of the vehicle global path planning method provided in this example are as follows:
[0058] Step 1. Input a map containing obstacles and road boundaries, set the initial configuration, target configuration, and target area, and set the grid position resolution ξ and angular resolution γ of the search space. The initial configuration N s , Target configuration N g Contains rear axle center position (x, y) and yaw angle information The target area A g Is the target configuration N g As the center, a circular area with the distance r as the radius;
[0059] Step 2. Set the initial open set to only include the initial configuration N s , The initial close set is empty. The initial configuration N s Heuristic value h s Set to 1, substitute value g s 0, N s The total cost of f s =h s +g s ;
[0060] Step 3. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com