Multi-legged walking robot and hydraulic driving system and control method for leg bending and stretching of multi-legged walking robot
The technology of a walking robot and control method, which is applied in the field of robots, can solve the problems of reduced throttling loss and low energy utilization rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
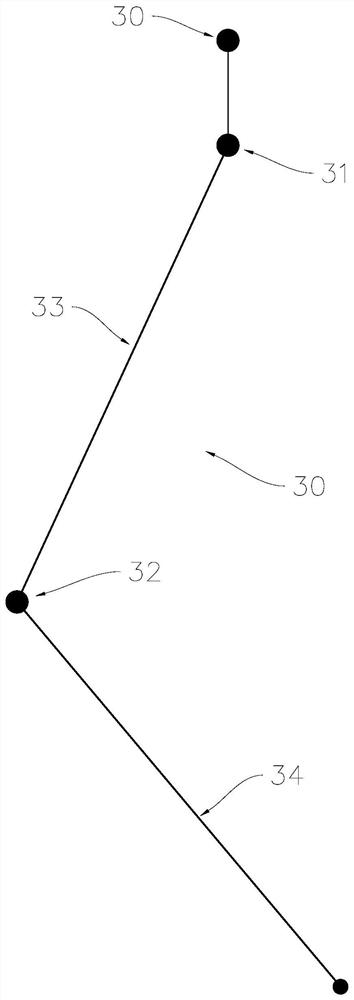
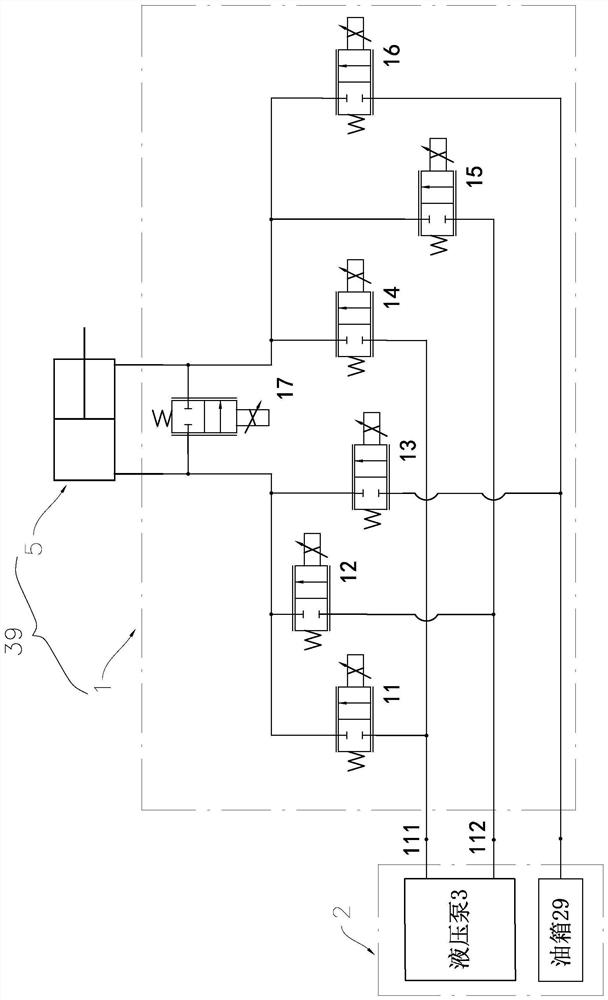
[0028] The multi-leg walking robot of the present invention adopts a plurality of such as figure 1 The hydraulic mechanical legs 3 shown constitute a mobile drive mechanism; as figure 1 and figure 2 As shown, the multi-legged walking robot specifically includes a body, a hydraulic mechanical leg 3, a control unit and a hydraulic source 2 arranged on the body, and the hydraulic source 2 includes a hydraulic pump 3, an accumulator 4 and a fuel tank 200; wherein, as figure 1 and figure 2 As shown, the hydromechanical leg 3 includes a root joint 30, a hip joint 31, a knee joint 32, a thigh bar 33, a calf bar 34, and a hydraulic drive system 39 for controlling the flexion and extension of the leg bar; the control unit includes a processor and a memory. A computer program is stored in the memory. When the computer program is executed by the processor, it can control the hydraulic pump and the hydraulic drive system based on the received control instructions and the detection dat...
Embodiment 2
[0042] As a description of Embodiment 2 of the present invention, only the differences from Embodiment 1 above will be described below.
[0043] like Figure 5 As shown, the hydraulic oil source 2 of the present invention is constructed using a parallel structure, including a high-pressure pump 25 and its driving motor 26, a low-pressure pump 21 and its driving motor 22, a high-pressure accumulator 27, a low-pressure accumulator 23, and a pressure sensor 24. The pressure sensor 28, the high pressure oil supply port 111 and the low pressure oil supply port 112; the output end of the low pressure pump 21 of the oil circuit is connected to the low pressure accumulator 23, the pressure sensor 24 and the low pressure oil supply port 112; the output end of the high pressure pump 25 Connect high-pressure accumulator 27, pressure sensor 28 and high-pressure oil supply port 111; high-pressure relief valve 30 connects high-pressure oil supply port 111 and fuel tank 200; low-pressure rel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com