Submissive stabilization control method in process of capturing spatial irregular moving object
A technology of motion target and stable control, which is applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc. It can solve the problems that the main body cannot effectively follow, damage the manipulator device, and the implementation method is simple.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
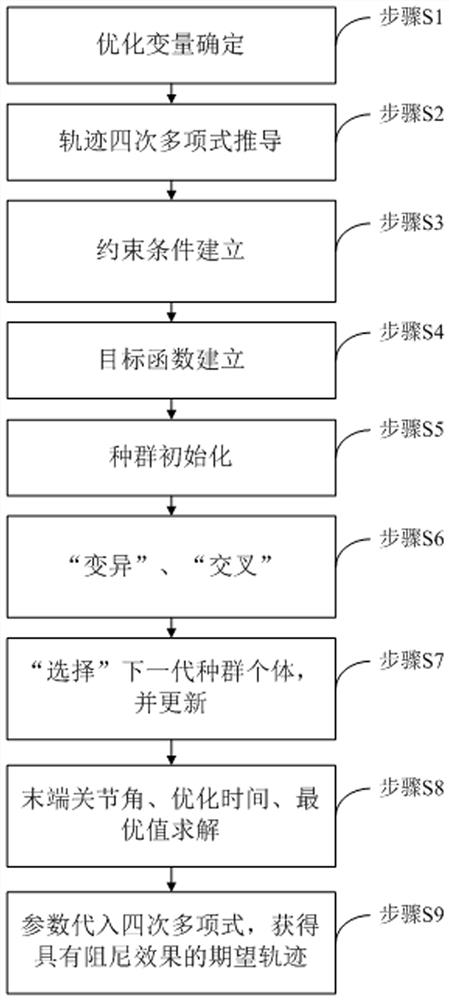
[0038] Such as figure 1 As shown, a compliant and calm control method in the process of capturing irregular moving targets in space includes the following steps:
[0039] S1, determining the optimization variables when the manipulator captures the target, the optimization variables include: damping time, terminal velocity, joint angular velocity and joint angular acceleration;
[0040] In order to make the damping fast, the optimization of time is one of the factors that need to be considered; secondly, preventing excessive joint angular velocity during the damping process is also a problem that needs to be considered in trajectory planning; finally, in order to match the actual engineering, the control The size of the torque is also the content that needs to be optimized. The modified genetic algorithm is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com