Suspension type intelligent mobile robot control system and method
A mobile robot and control system technology, applied in the elevated railway system with suspended vehicles, control drives, motors, etc., can solve the problems of large turning radius, large space occupation, and long track length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0046] A suspended intelligent mobile robot control system in this embodiment includes a parking space, a track, a mobile robot, a charging box 14, a power supply device, a processing module and an acquisition module.
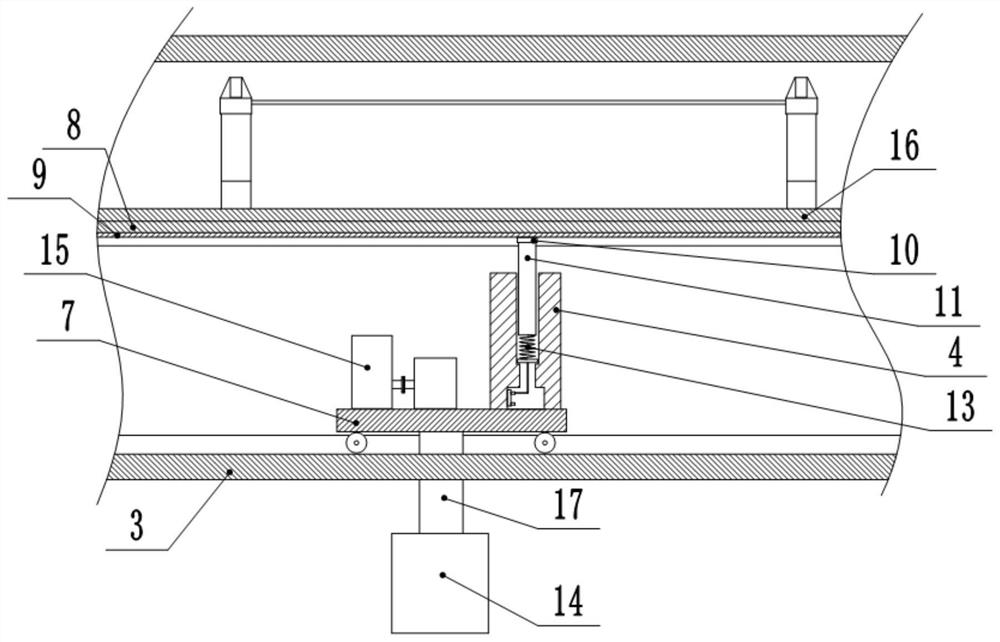
[0047] Such as figure 1 Shown, also comprise fixed bracket 2, fixed bracket 2 sides are fixedly connected with the wall or column 1 next to the parking space; above.
[0048] Tracks are set along the parking spaces. In the present embodiment, the track adopts a hollow box-type track 3, the top surface and the side wall of the box-type track 3 are sealed, and the middle position of the bottom surface is open; The upper part of the box track 3 is also horizontally provided with a mounting plate 16 , and the two ends of the mounting plate 16 are respectively fixedly connected with the side walls of the box track 3 .
[0049] Such as figure 2 As shown, the mobile robot is located in the box-type track 3 , and the mobile robot includes a carrier plate 7 , trave...
Embodiment 2
[0082] The difference between this embodiment and Embodiment 1 is that, if Figure 5 As shown, in this embodiment, a placement frame 18, a charging cable 19 and a connector control module are also included.
[0083] One end of the charging cable 19 is electrically connected to a charging head, and the charging head is used to be inserted into the charging port of the electric vehicle.
[0084] It also includes a connecting male head 20, which is cylindrical, an insulating ring 21 is fixed circumferentially on the lower part of the outer wall of the connecting male head 20, and an iron ring 22 is adhered to the outer wall of the insulating ring 21 circumferentially. The connecting male head 20, the bonding ring and the iron ring 22 are coaxial.
[0085] Placing frame 18 is fixed on the metope below box type track 3 or on column 1, and each parking stall corresponds to a placing frame 18. The placement frame 18 is longitudinally provided with a placement hole, the connection m...
Embodiment 3
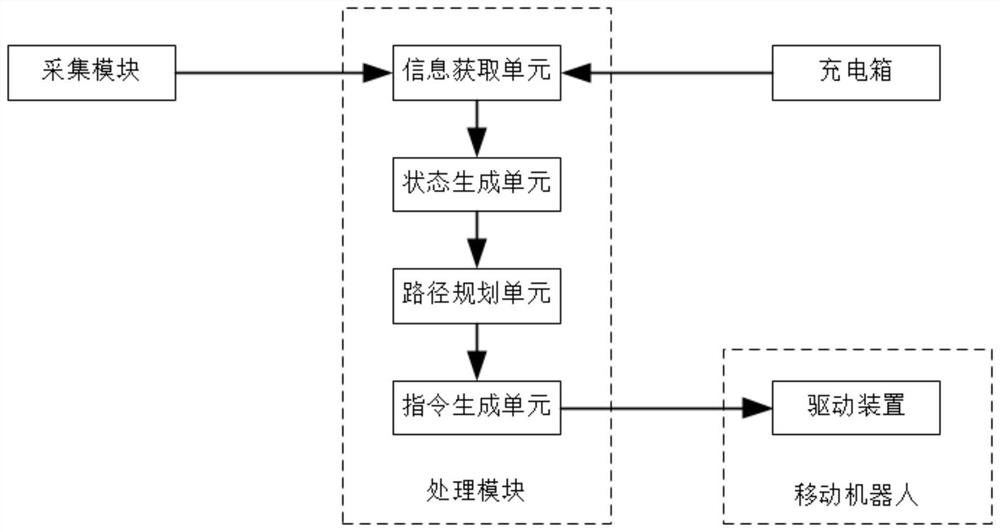
[0103] The difference from Embodiment 2 is that in the control system of the suspended intelligent mobile robot of this embodiment, the charging box is also used to send the remaining charging time to the information acquisition unit; the information acquisition unit is used to receive the remaining charging time of the charging box.
[0104] The instruction generation unit is also used to judge whether there is a working charging box whose remaining charging time is less than the preset waiting time on the obstructed path. If not, the instruction generating unit sends the corresponding mobile robot to all charging boxes on the obstructed path according to the location. A second movement instruction; if there is one, the instruction generation unit generates a third movement instruction. The preset waiting time is 5-30 minutes.
[0105] The working charging box whose remaining charging time is less than the preset waiting time, and the driving device of the mobile robot corres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com