Driverless automobile dynamic lane changing track planning method based on Fraenet coordinate system
An unmanned vehicle, trajectory planning technology, applied in transmission systems, anti-collision systems, combustion engines, etc., can solve problems such as less dynamic lane change trajectory planning, ignoring the dynamic environment impact, and not fully considering the impact of surrounding vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
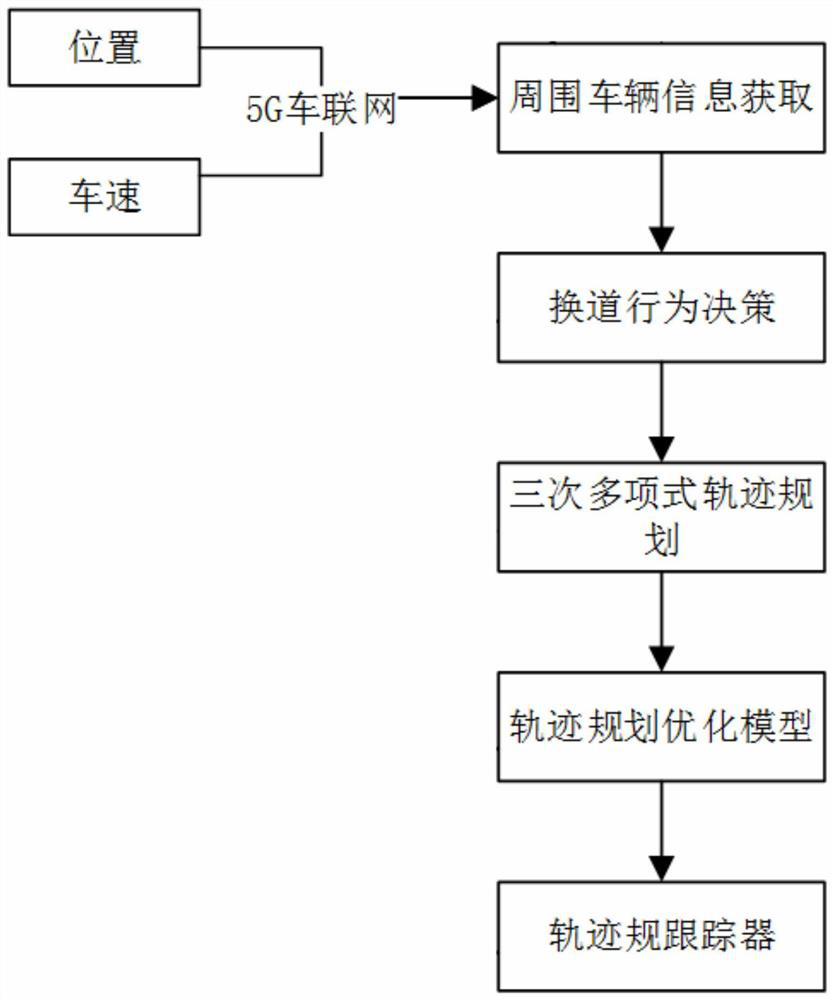
[0052] see figure 1 , image 3 and Figure 6 , the present embodiment discloses a dynamic lane-changing trajectory planning method for an unmanned vehicle based on the Frenet coordinate system, comprising the following steps:
[0053] 1) Using the Frenet coordinate system as the working coordinate system, a cubic polynomial path generation model based on discrete global trajectory points is established. Among them, the Frenet coordinate system uses the center line of the road as the reference line, the longitudinal direction is the direction of the reference line, and the horizontal direction is along the normal direction of the reference line. The path generation model updates the lane-changing trajectory based on the solution of the lateral offset.
[0054] Take the starting point of the vehicle as the coordinate origin, the driving direction of the starting point of the vehicle is the positive direction of the x-axis, the vertical driving direction is the positive directio...
Embodiment 2
[0088] This embodiment discloses a dynamic lane-changing trajectory planning device for an unmanned vehicle based on the Frenet coordinate system, which includes an on-board sensor, a microprocessor, a memory, and a bottom controller.
[0089] A computer program is stored in the memory. The computer program is used to implement the method as described in Embodiment 1 when executed by a microprocessor.
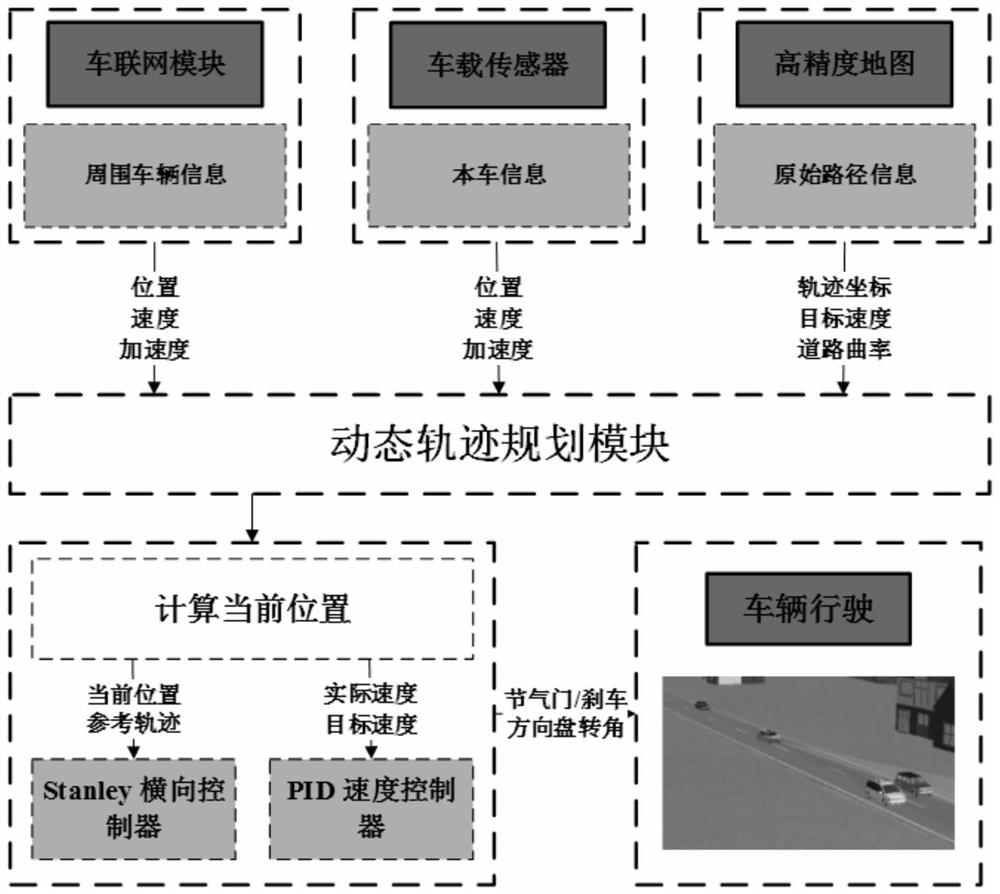
[0090] The on-vehicle sensor perceives the information of the own vehicle. The Internet of Vehicles module perceives the surrounding vehicle modules. High-precision map perception raw path information. The on-vehicle sensors, the Internet of Vehicles module and the high-precision map transmit data to the microprocessor. After analysis and calculation by the microprocessor, the planned lane change trajectory is sent to the bottom controller for execution.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com