


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Personification actuation device for robot neck
An actuating device and robot technology, applied in the field of robotics, can solve the problems of reducing the simulation degree of simulation robots, reducing the simulation degree of simulation robots, and the actions are not coherent and real, and achieve good thermoelectric effect performance, unlimited size, good mechanical The effect of processability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
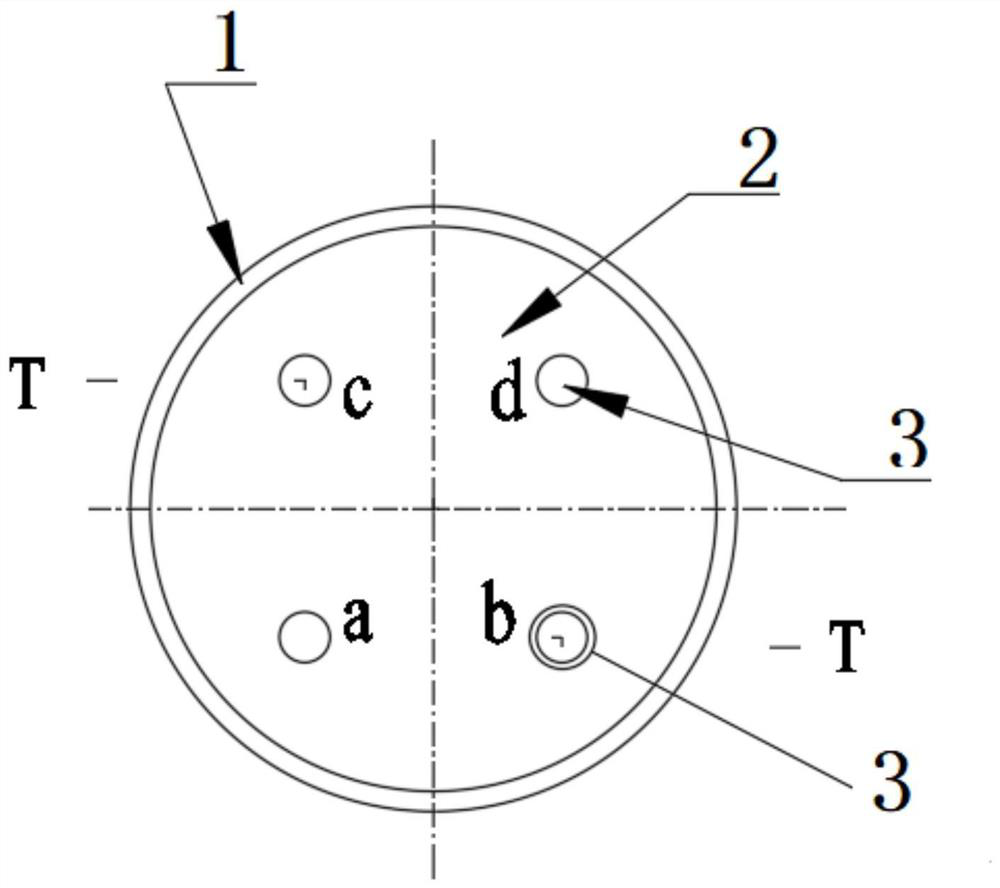
[0052] Reference attached Figure 1-3 , attached Figure 5-7 , is a robot neck anthropomorphic actuating device proposed by the present application. As can be seen from the figure, the robot neck anthropomorphic actuating device includes the outermost layer of artificial skin 1 and the polydimethylsiloxane filling body 2 in the middle layer , and the compound bending driver 3 for pitching and turning of the neck in the polydimethylsiloxane filling body 2, the supporting upper cover plate 4 on the upper part of the actuating device and the actuating The supporting lower cover plate 5 at the bottom of the device.
[0053] The composite bending driver is composed of a first composite region 3-1, a deformation region 3-2 and a second composite region 3-3, and the first composite region 3-1, the deformation region 3-2 and the second composite region 3-3 have The driver body 3-4 integrally formed of shape memory alloy;
[0054] as attached Figure 5-6 As shown, the radial longit...
Embodiment 2
[0067] Reference attached Figure 1-3 , attached Figure 5-7 , is a robot neck anthropomorphic actuating device proposed by the present application. As can be seen from the figure, the robot neck anthropomorphic actuating device includes the outermost layer of artificial skin 1 and the polydimethylsiloxane filling body 2 in the middle layer , and the compound bending driver 3 for pitching and turning of the neck in the polydimethylsiloxane filling body 2, the supporting upper cover plate 4 on the upper part of the actuating device and the actuating The supporting lower cover plate 5 at the bottom of the device.
[0068] The composite bending driver is composed of a first composite region 3-1, a deformation region 3-2 and a second composite region 3-3, and the first composite region 3-1, the deformation region 3-2 and the second composite region 3-3 have The driver body 3-4 integrally formed of shape memory alloy;
[0069] as attached Figure 5-6 As shown, the radial longit...
Embodiment 3
[0076] Reference attached Figure 1-3 , attached Figure 5-7 , is a robot neck anthropomorphic actuating device proposed by the present application. As can be seen from the figure, the robot neck anthropomorphic actuating device includes the outermost layer of artificial skin 1 and the polydimethylsiloxane filling body 2 in the middle layer , and the compound bending driver 3 for pitching and turning of the neck in the polydimethylsiloxane filling body 2, the supporting upper cover plate 4 on the upper part of the actuating device and the actuating The supporting lower cover plate 5 at the bottom of the device.
[0077] The composite bending driver is composed of a first composite region 3-1, a deformation region 3-2 and a second composite region 3-3, and the first composite region 3-1, the deformation region 3-2 and the second composite region 3-3 have The driver body 3-4 integrally formed of shape memory alloy;
[0078] as attached Figure 5-6 As shown, the radial longit...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com