Finite time convergence vehicle formation control method based on disturbance observer
A disturbance observer and finite-time technology, applied in vehicle position/route/altitude control, non-electric variable control, two-dimensional position/course control, etc., can solve the influence of cooperative control, without considering vehicle mismatch speed disturbance, etc. problems, to achieve the effect of ensuring tracking performance and security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0023] The present invention will be further described in detail below with reference to the embodiments given in the accompanying drawings.
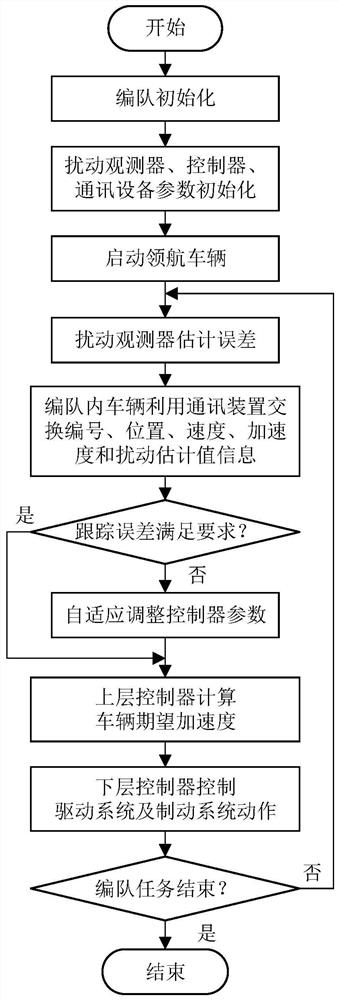
[0024] refer to figure 1 As shown, the vehicle formation considered by the present invention consists of N+1 vehicles, of which the 0th vehicle is a leading vehicle traveling at a uniform speed, and the remaining 1-N vehicles are following vehicles. Positioning, communication and control equipment is installed on each following vehicle. The positioning device adopts GPS and IMU fusion technology, which can obtain the current vehicle's position, speed and acceleration information and send it to the CAN bus. The communication device can obtain the own vehicle information from the CAN bus, send it to other vehicles, and receive other vehicle information. The upper controller obtains the vehicle information and other vehicle information from the CAN bus, calculates the expected acceleration and sends it to the bottom controller through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com