Object detection method and device based on three-dimensional data and two-dimensional image
A two-dimensional image and object detection technology, applied in the field of image processing, can solve the problems of high price, inability to extract object point cloud, sparse data, etc., achieve recognition and accurate positioning, reduce pending data, and improve efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
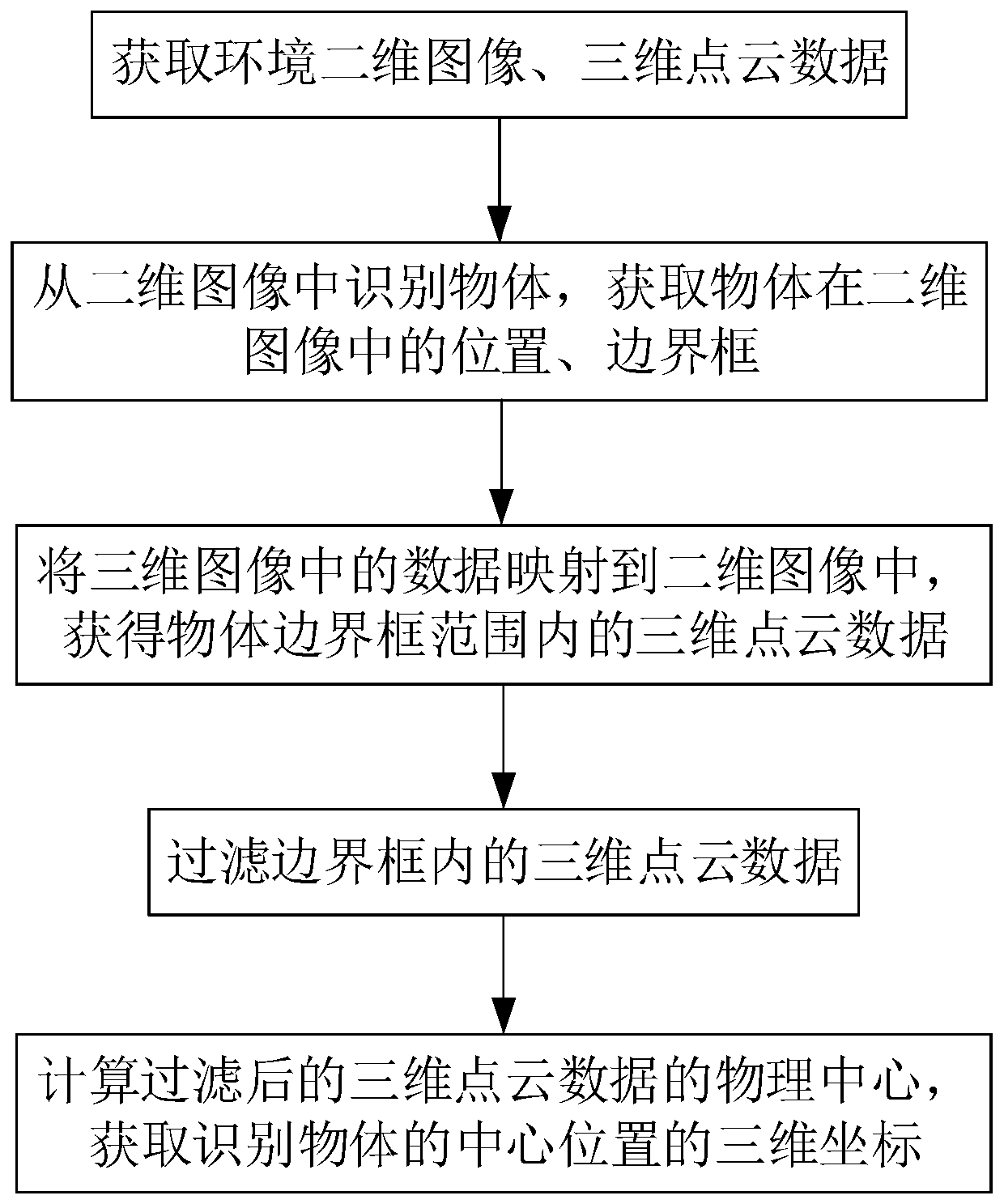
[0034] An object detection method based on three-dimensional data and two-dimensional images of the present invention, such as figure 1 shown, including the following steps:
[0035] S1. Acquire 2D images and 3D point cloud data of the environment;
[0036] S2. Recognize the object from the two-dimensional image, and obtain the position and bounding box of the object in the two-dimensional image;
[0037] S3. Map the data in the three-dimensional image to the two-dimensional image, and obtain the three-dimensional point cloud data within the bounding box of the object;
[0038] S4, filtering the three-dimensional point cloud data in the bounding box;
[0039] S5. Calculate the physical center of the filtered three-dimensional point cloud data, and obtain the three-dimensional coordinates of the central position of the identified object.
[0040] In a specific embodiment of the present application, a camera is used to obtain a two-dimensional image, and a three-dimensional l...
specific Embodiment 2
[0059] In a specific embodiment of the present application, including M groups of two-dimensional images of the environment, according to the positional relationship between the three-dimensional data and each group of two-dimensional images, the three-dimensional point cloud data is mapped to the two-dimensional image coordinates, and each group of two-dimensional Image, filtering points beyond the visual range corresponding to the two-dimensional image, combining all two-dimensional images, so that all three-dimensional point cloud data points are mapped to two-dimensional image coordinates. Wherein, M is a positive integer greater than or equal to 1.
[0060] Specifically, it includes three sets of environmental two-dimensional images, forming a full coverage of 360 degrees in the horizontal direction. The visual range of each group of environmental two-dimensional images corresponding to the horizontal direction is greater than or equal to 120 degrees. According to the posi...
specific Embodiment 3
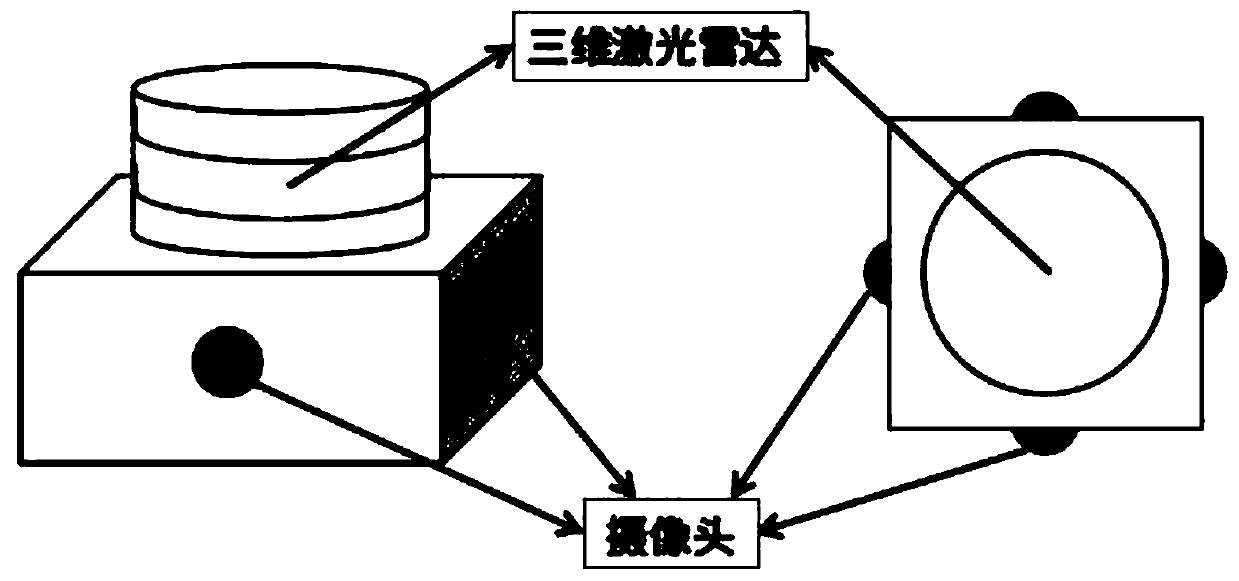
[0063] An object detection device for three-dimensional data and two-dimensional images, including a camera, a three-dimensional laser radar, and a data processing center. The three-dimensional laser radar is set horizontally, and the relative positions of the camera and the three-dimensional laser radar are fixed to ensure that the coordinates of the two-dimensional data and the three-dimensional data can be realized. Mutual conversion, the horizontal shooting range of the camera is less than or equal to the scanning range of the 3D laser radar; the 3D laser radar generates 16 laser lines, collects point cloud data of each laser line, and the data processing center obtains the 2D image captured by the camera, the 3D laser radar The 3D point cloud data of 16 laser lines is taken, and the object detection method based on 3D lidar and vision is used to recognize the object in the 2D image and obtain the bounding box of the object. According to the relative position relationship be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com