Intelligent rehabilitation robot for lower limb gait training
A rehabilitation robot and gait training technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as delayed rehabilitation cycle and treatment effect, and achieve the effect of improving rehabilitation effect, reasonable structural design, and increasing comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
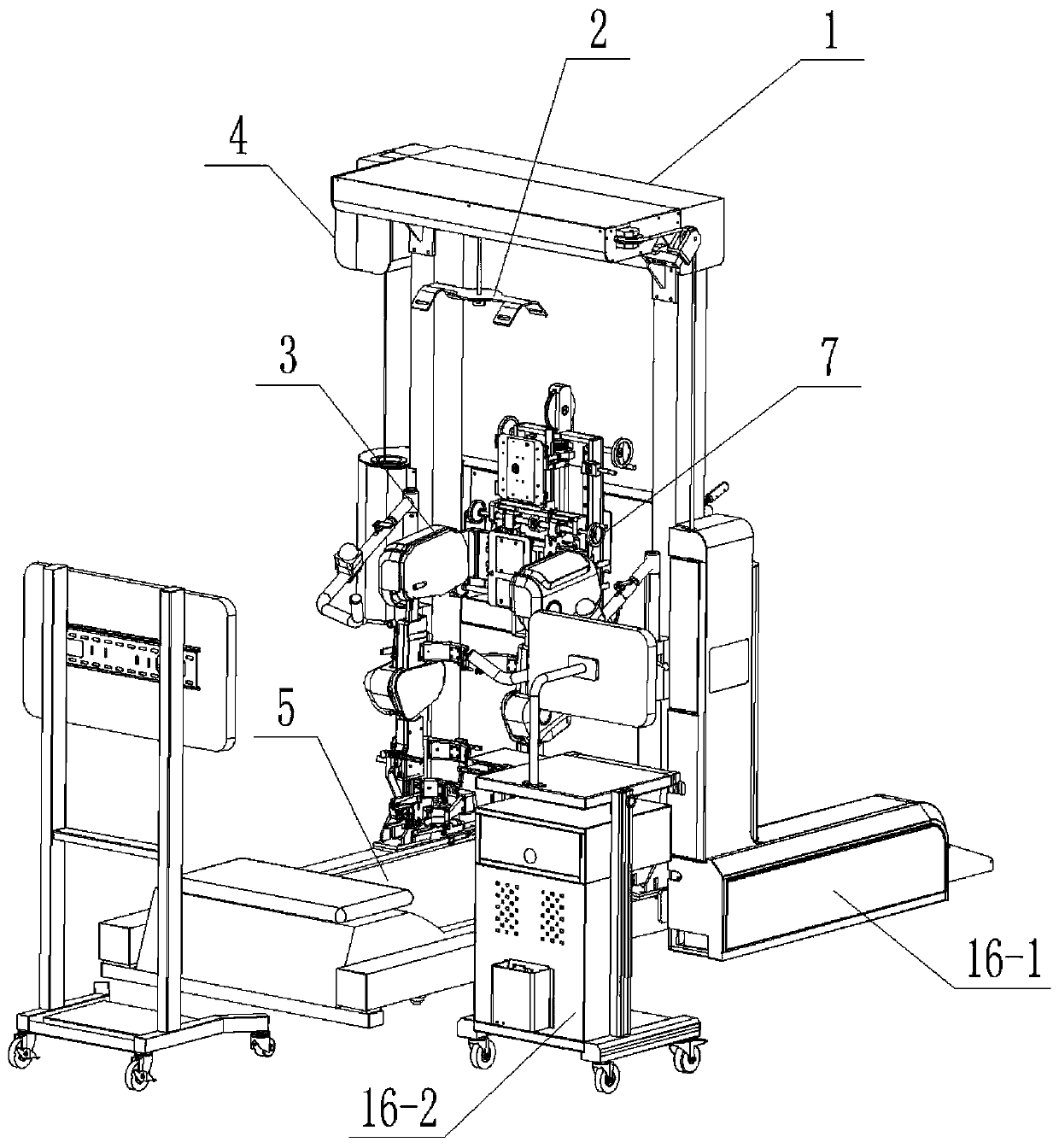
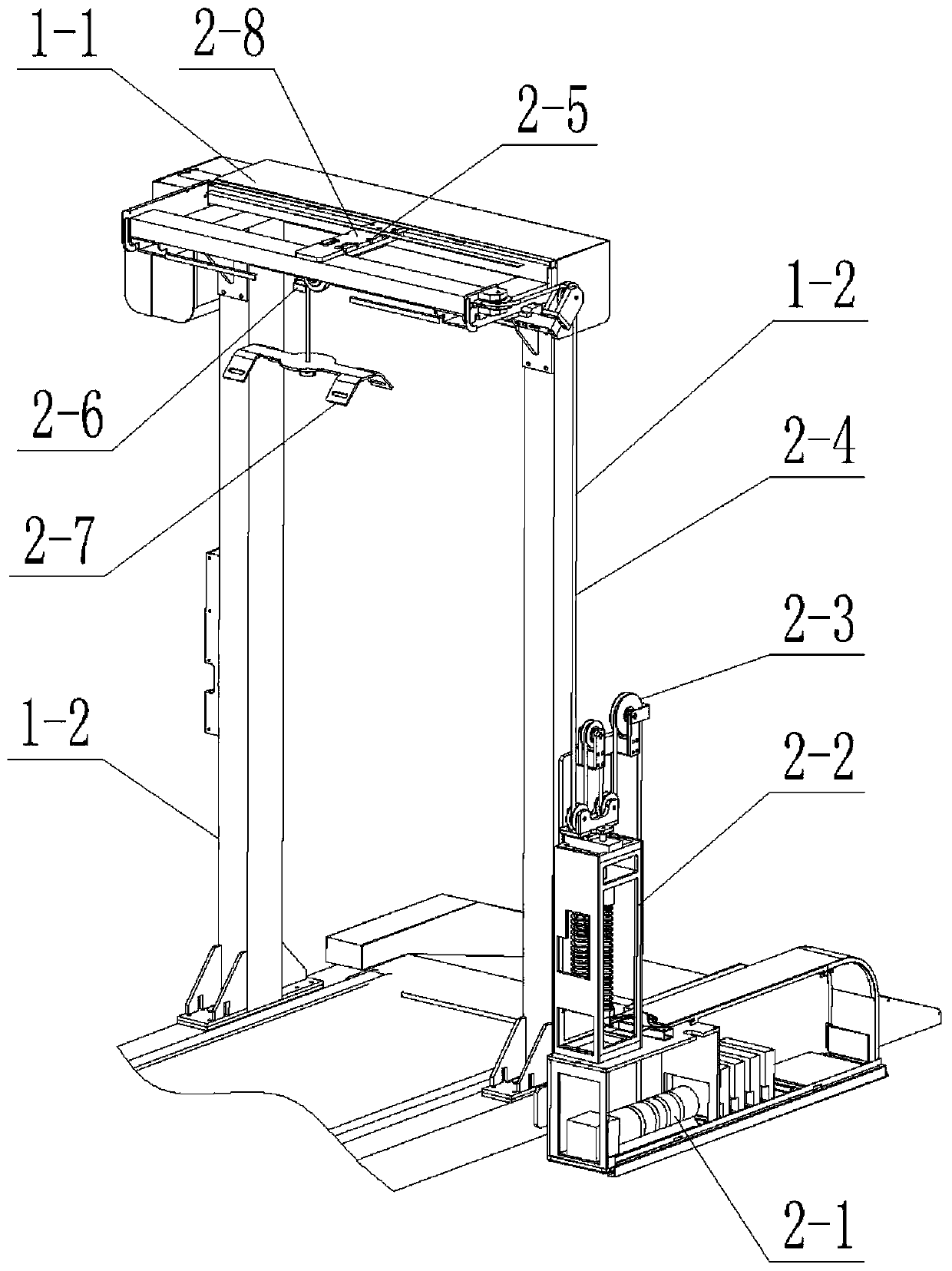
[0035] Specific implementation mode one: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 , Figure 9 with Figure 10 As shown, the specific embodiment adopts the following technical solutions. The present embodiment includes a frame 1, a weight-reducing lifting mechanism 2, a lower limb robot 3, a gravity compensation mechanism 4, and a sole matching road 5. The frame 1 includes a crossbeam 1-1 and two Two uprights 1-2 are vertically arranged side by side on the sole matching road 5, the lower limb robot 3 is arranged between the two uprights 1-2 and it is set close to the sole matching road 5, and the crossbeam 1-1 is horizontal Arranged between two columns 1-2, the gravity compensation mechanism 4 and the weight-reducing lifting mechanism 2 are respectively arranged on the two columns 1-2, and the connection end of the weight-reducing lifting mechanism 2 passes through the beam 1-1 It is detachably connected with the reh...
specific Embodiment approach 2
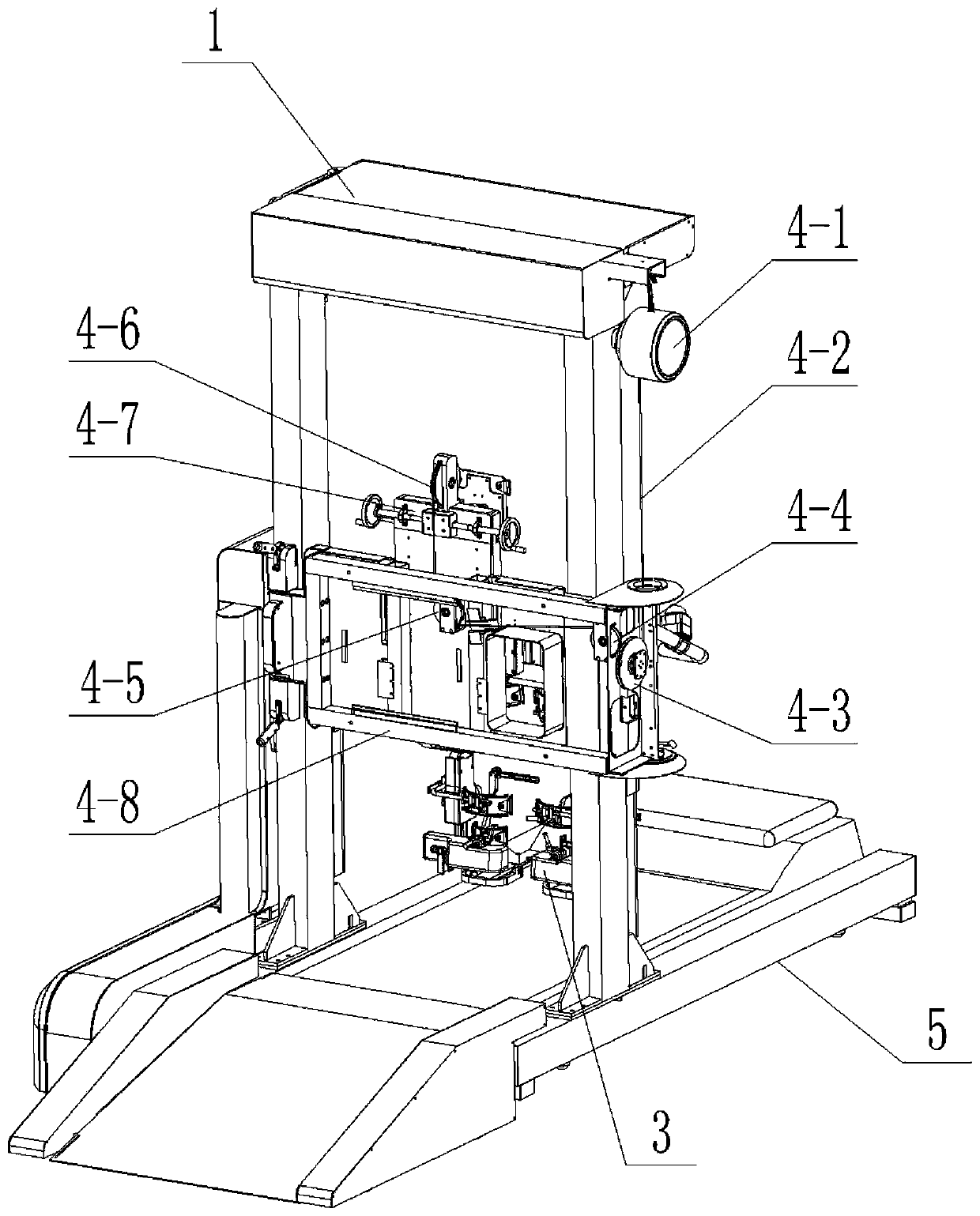
[0036] Specific embodiment 2: This embodiment is a further limitation of specific embodiment 1. The gravity compensation mechanism 4 includes a compensator 4-1, a traction rope 4-2, a primary fixed pulley 4-3, a secondary fixed pulley 4-4, Three-stage fixed pulley 4-5, four-stage fixed pulley 4-6, base plate 4-7 and support frame 4-8, base plate 4-7 is vertically arranged between two columns 1-2, and support frame 4-8 is arranged On the base plate 4-7, the lower limb robot 3 is fixedly installed on the support frame 4-8, the four-stage fixed pulley 4-6 and the three-stage fixed pulley 4-5 are respectively arranged on the top and bottom of the support frame 4-8, and the second stage The fixed pulley 4-4 is arranged on the bottom plate 4-7, the first fixed pulley 4-3 is arranged on the outer wall of one of the two columns 1-2, and the compensator 4-1 is fixedly installed on the On the top of the same column 1-2 as the primary fixed pulley 4-3, one end of the traction rope 4-2 is...
specific Embodiment approach 3
[0043] Specific embodiment three: This embodiment is a further limitation of specific embodiment one or two. The lower limb robot 3 includes a leg spacing adjustment device 7 and two mechanical legs. The leg spacing adjustment device 7 is arranged in cooperation with the hip joint of the rehabilitation personnel. The spacing adjustment device 7 is fixedly installed on the support frame 4-8;
[0044] The two mechanical legs are respectively the left mechanical leg and the right mechanical leg. The two mechanical legs are arranged side by side under the leg spacing adjustment device 7. Each mechanical leg includes a thigh fixing mechanism 8, a calf fixing mechanism 9, an ankle fixing mechanism 10 and a second mechanical leg. A motor 11, the thigh fixing mechanism 8, the calf fixing mechanism 9 and the ankle fixing mechanism 10 are sequentially connected from top to bottom, the ankle fixing mechanism 10 is equipped with a first motor 11, and the thigh fixing mechanism 8 includes a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com