Four-wheel steering AGV track deviation rectification method based on two-dimensional code navigation
A four-wheel steering and two-dimensional code technology, which is applied in two-dimensional position/channel control, steering mechanism, steering rod, etc., can solve the problem that feedback correction is not applicable, it is difficult to accurately calculate the AGV motion state, and it is impossible to obtain real-time and accurate information. Position information feedback and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0028] A four-wheel steering AGV trajectory correction method based on two-dimensional code navigation proposed according to an embodiment of the present invention will be described below with reference to the accompanying drawings.
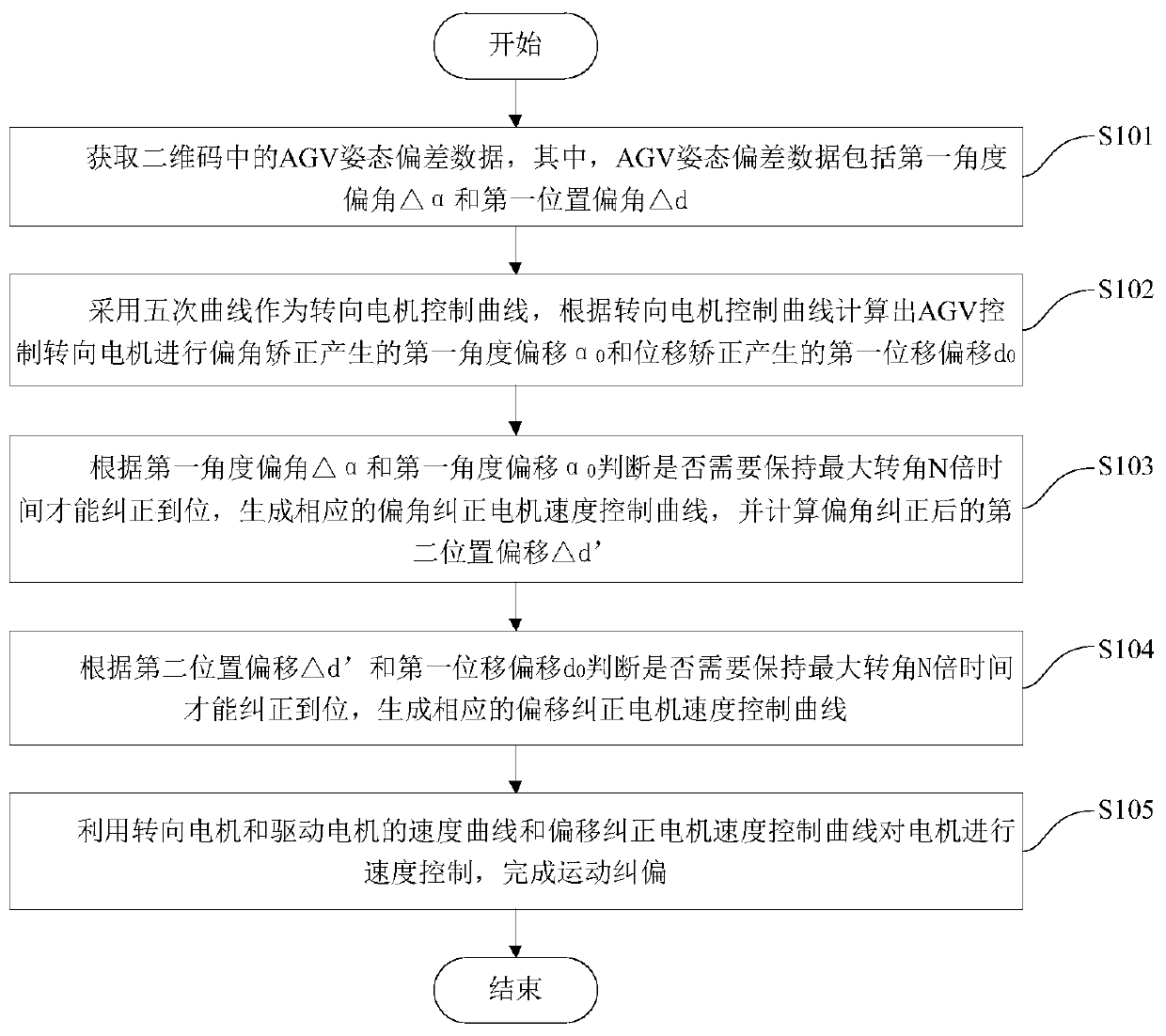
[0029] figure 1 It is a flowchart of a four-wheel steering AGV trajectory correction method based on two-dimensional code navigation according to an embodiment of the present invention.
[0030] Such as figure 1 As shown, the four-wheel steering AGV trajectory correction method based on two-dimens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com