EKF-based multi-sensor fusion greenhouse inspection robot tracking method
A multi-sensor fusion, inspection robot technology, applied in instruments, computer parts, measuring devices, etc., can solve the problems of sensor deviation, non-line-of-sight propagation influence, sensitivity error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
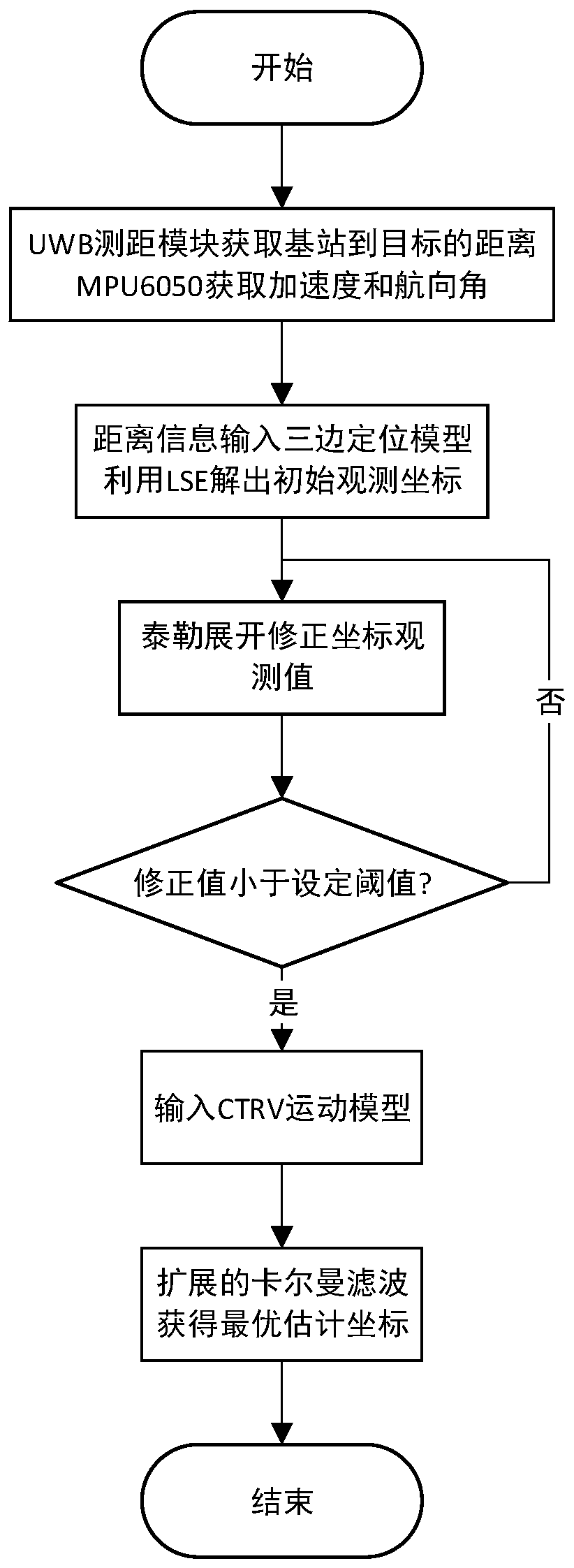
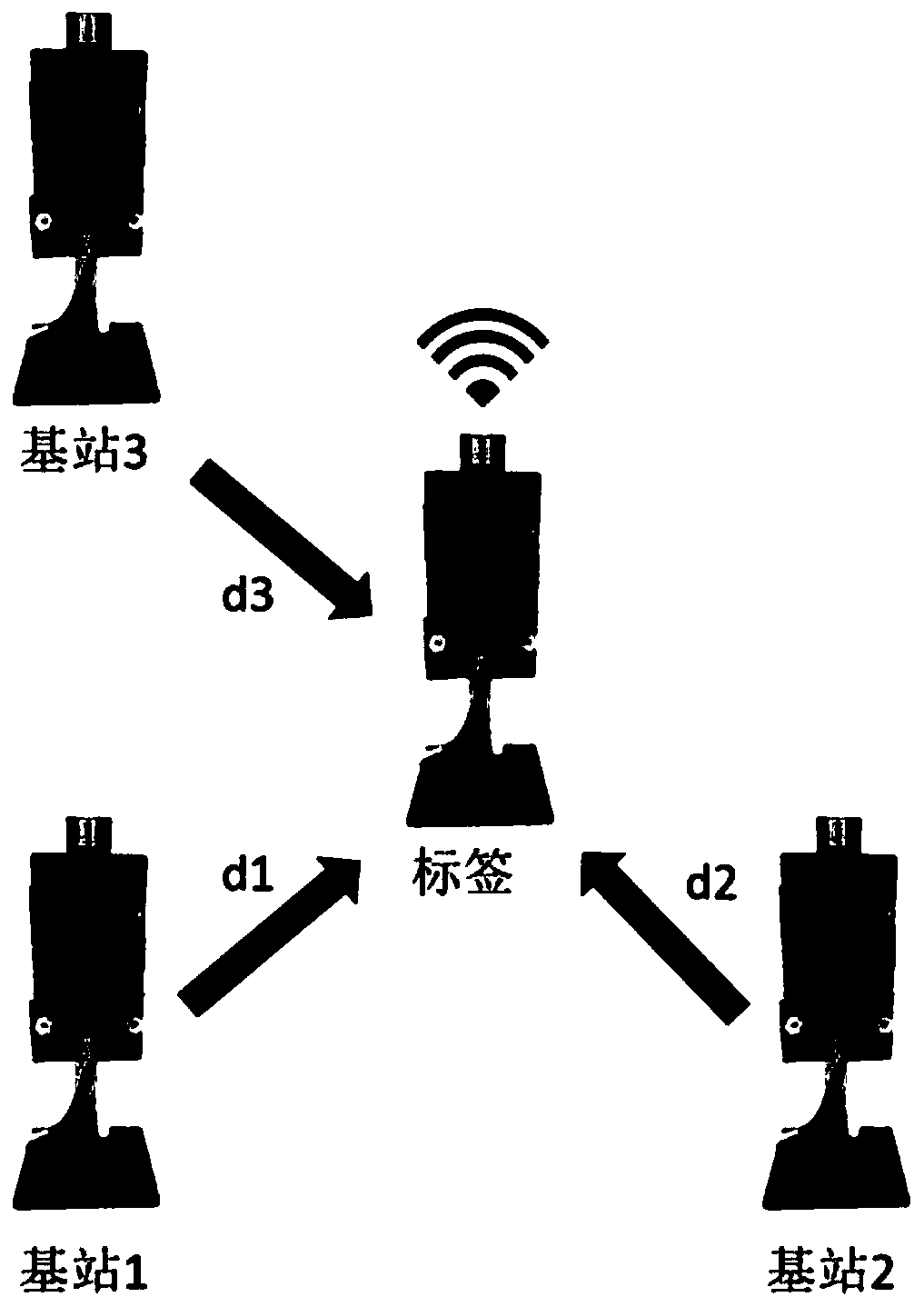
[0105]The present invention first obtains the distance information from three base stations with known coordinates to the robot in real time through the UWB ranging module based on the DS-TWR ranging technology, and at the same time obtains the acceleration and heading angle of the robot in real time through the MPU6050 carried by the robot. Based on the least squares method, the initial observation value of the robot coordinates is obtained from the three distance values using the trilateral positioning model, and the Taylor algorithm is used to iteratively correct the observation point, and the corrected coordinate observation value, real-time measured robot acceleration and heading angle are simultaneously transmitted. The CTRV motion model (constant rate and speed model), uses the extended Kalman filter (EKF) to fuse the sensor data, and outputs the extended Kalman filter result as the current position of the robot to obtain a multi-sensor fusion greenhouse inspection Rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com