Global lane line detection method based on key points and gradient equalization loss
A technology of lane line detection and key points, which is applied in the direction of instruments, biological neural network models, character and pattern recognition, etc., can solve the problems of ignoring the global information of lane lines, large amount of calculation of pixel-level detection network, easy to lose local details of targets, etc. , to achieve high practical application value, high detection robustness and positioning accuracy, and superior real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings.
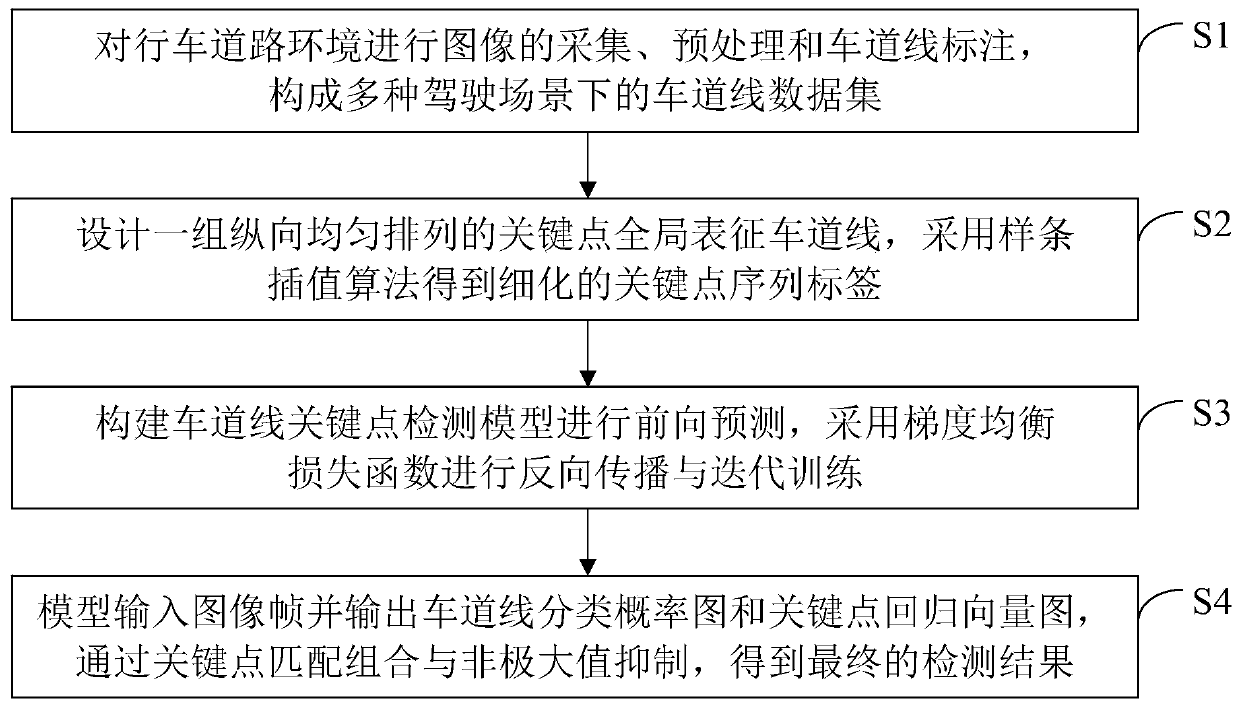
[0045] like figure 1 As shown, a global lane line detection method based on key points and gradient equalization loss, including steps:
[0046]S1. Turn on the front-view camera on the smart vehicle, collect images of the driving road environment, preprocess the collected images and mark lane lines, and form training sets, test sets and verification sets in various driving scenarios;
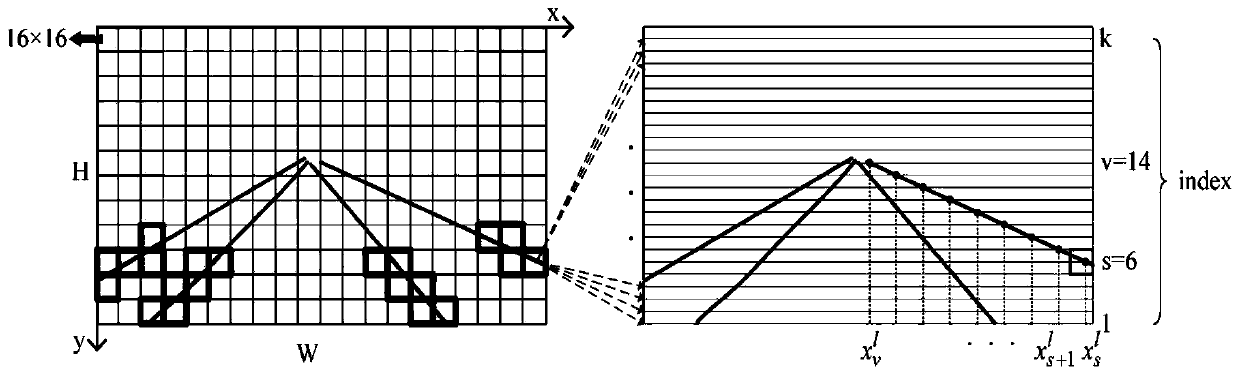
[0047] S2. Design a group of key points uniformly arranged longitudinally to globally represent the lane lines, perform spline interpolation on the lane line annotations, and obtain refined key point sequence labels;
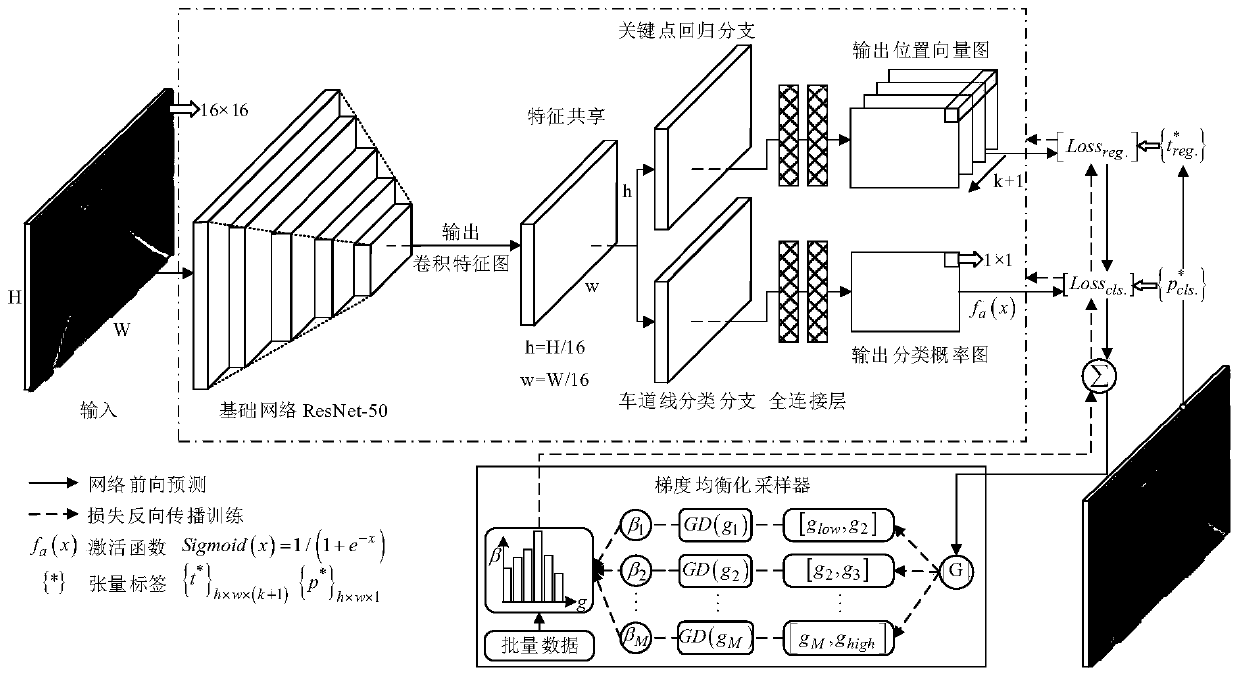
[0048] S3. Construct a lane line key point detection model, input the training set into the lane line key point detection model for forward predictio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com