Ship autopilot composite neural network PID control method
A technology of neural network and control method, which is applied in the field of ship autopilot compound neural network PID control, can solve the problems of missing control parameter nonlinear coupling relationship, high fuel consumption, unusable, etc., achieve high flexibility and practicability, and improve Effects of speed and accuracy, improved stability and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] In the present invention, based on gradient steepest descent method and ship course keeping Jacobian (Jacobian) information identification improved BP (backpropagation) & RBF (radial basis function)-NN (neural network) online adaptive ship motion characteristics to optimize the autopilot PID control parameters to solve the optimal technical problem of PID control parameters cooperating with each other to restrict nonlinearity, thereby improving the gradual stability and accuracy of ship navigation, and solving the problem of large changes in the range and frequency of ship navigation paths.
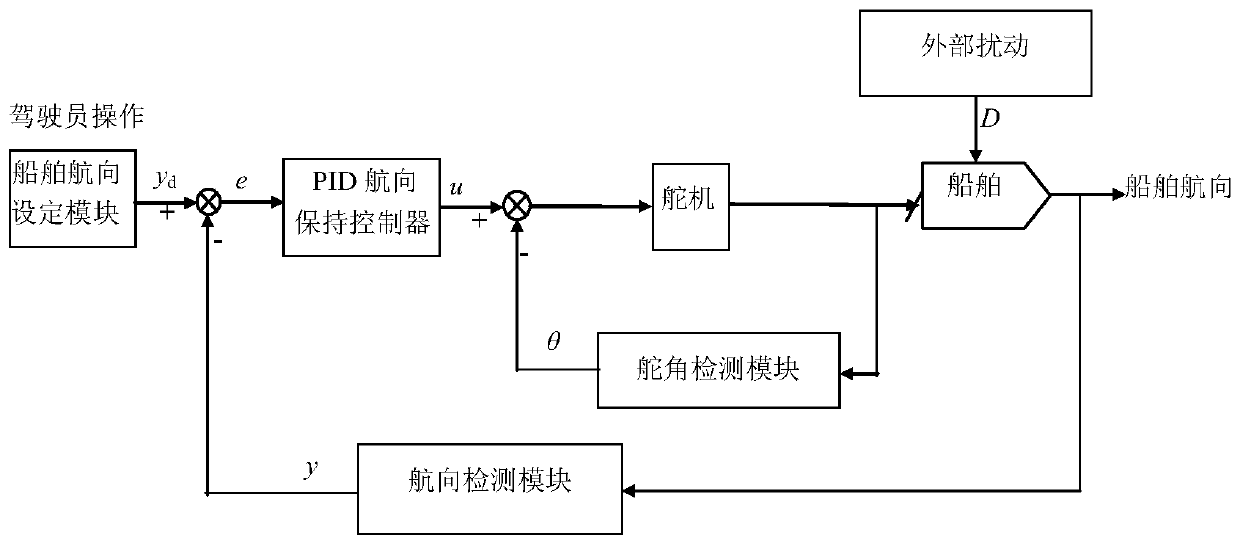
[0056] Ship's course keeping control system among the present invention, as image 3 Shown: The driver designs the route, plans the driving direction on different sections of the route, and uses it as the set value y of the ship’s course d (k), the control ship heading y(k) is the navigation direction, and the course deviation e(k)=y d (k)-y(k), wherein k is the sampling sequence ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com