Posture recognition method and device for engineering machinery cantilever crane type equipment and engineering machinery
A technology of engineering machinery and recognition methods, applied in character and pattern recognition, computer parts, image data processing, etc., can solve the problems of low accuracy and high cost, achieve good emergency response, improve accuracy, and solve insufficient reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
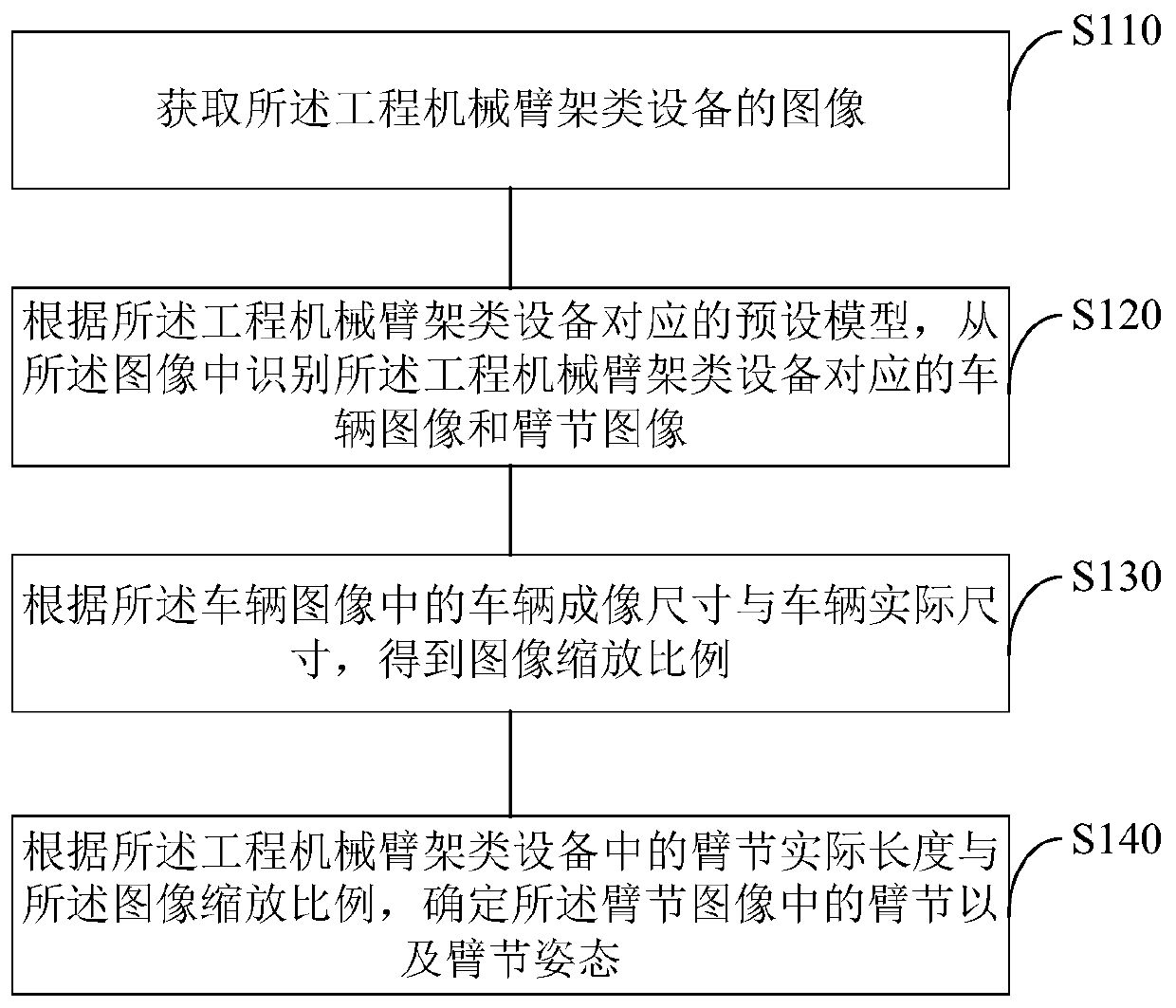
[0046] figure 1 It is a schematic flowchart of a gesture recognition method for construction machinery boom equipment provided in Embodiment 1 of the present invention, wherein the construction machinery boom equipment includes boom pump trucks, lifting machinery with folding arms, and folding arm firefighting equipment. car etc. like figure 1 As shown, the gesture recognition method may include the following steps:
[0047] Step S110, acquiring an image of the boom-like equipment of the engineering machinery.
[0048] Wherein, after acquiring the image of the engineering manipulator arm joints, since there are interference signals when acquiring the image, it is necessary to preprocess the acquired image, for example, conventional image processing such as grayscale processing and denoising processing technology, so that the processed image is clearer, and it is convenient to determine the posture of the arm joint later.
[0049] Step S120, according to the preset model corr...
Embodiment 2
[0066] Before the first embodiment above obtains the image of the construction machinery jib equipment, the solution of the second embodiment of the present invention can be combined with the inclination sensor to jointly determine the attitude of the boom section. Figure 4 It is a schematic flowchart of a posture recognition method for construction machinery boom equipment provided in Embodiment 2 of the present invention. like Figure 4 As shown, the method includes the following steps:
[0067] Step S410, obtaining the reading data of the inclination sensor between the arm segments in the arm frame equipment of the construction machinery;
[0068] Step S420, judging whether the read data of all the inclination sensors has been obtained, if yes, continue to execute step S410, otherwise execute step S430;
[0069] Step S430, determining that the inclination sensor for which the read data has not been obtained is faulty, and notifying the acquisition of the image of the con...
Embodiment 3
[0076] Figure 5 It is a schematic structural diagram of a posture recognition device for construction machinery jib equipment provided in Embodiment 3 of the present invention. The posture recognition device is based on the same inventive idea as the posture recognition method in Embodiment 1. like Figure 5 As shown, the gesture recognition device may include: a storage module 10 for storing computer-executable instructions; and a control module 20 for executing the computer-executable instructions to perform the following operations:
[0077] Obtaining the image of the boom-type equipment of the construction machinery;
[0078] According to the preset model corresponding to the boom-type equipment of the construction machinery, identify the vehicle image and the jib image corresponding to the boom-type equipment of the construction machinery from the image;
[0079] Obtaining the image scaling ratio according to the vehicle imaging size and the actual vehicle size in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com