Arm unfolding gripper mechanism of industrial robot
A technology of industrial robots and spreading arms, used in manipulators, manufacturing tools, chucks, etc., can solve the problems of inaccurate grasping of workpieces, restricting enterprises, difficult to control position adjustment, etc., to achieve convenient and rapid positioning and pre-compression, and improve work efficiency. , the effect of eliminating steric hindrance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
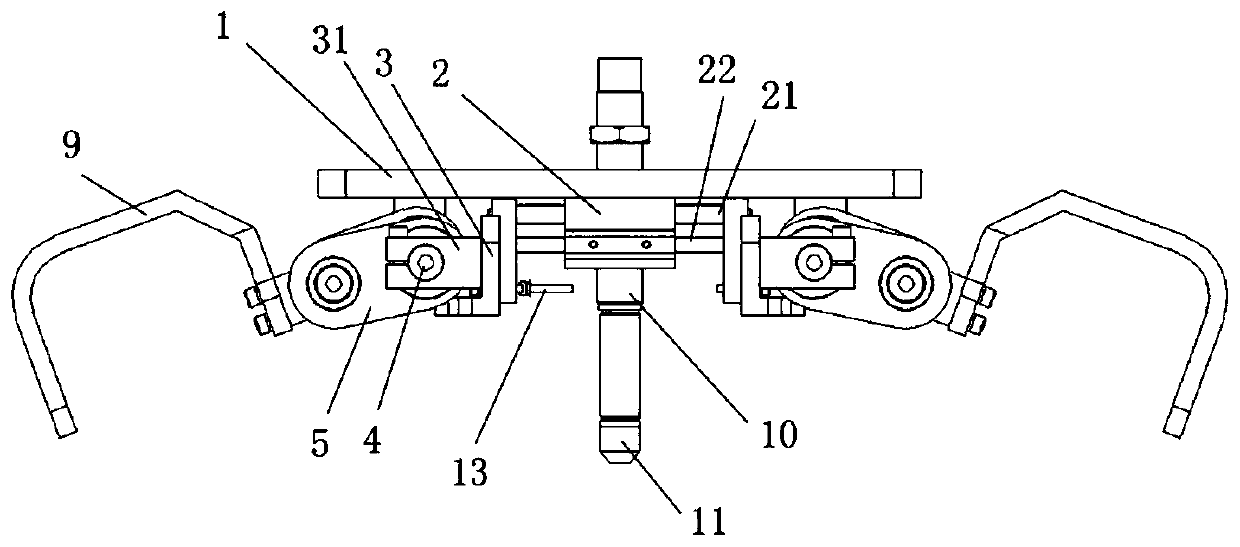
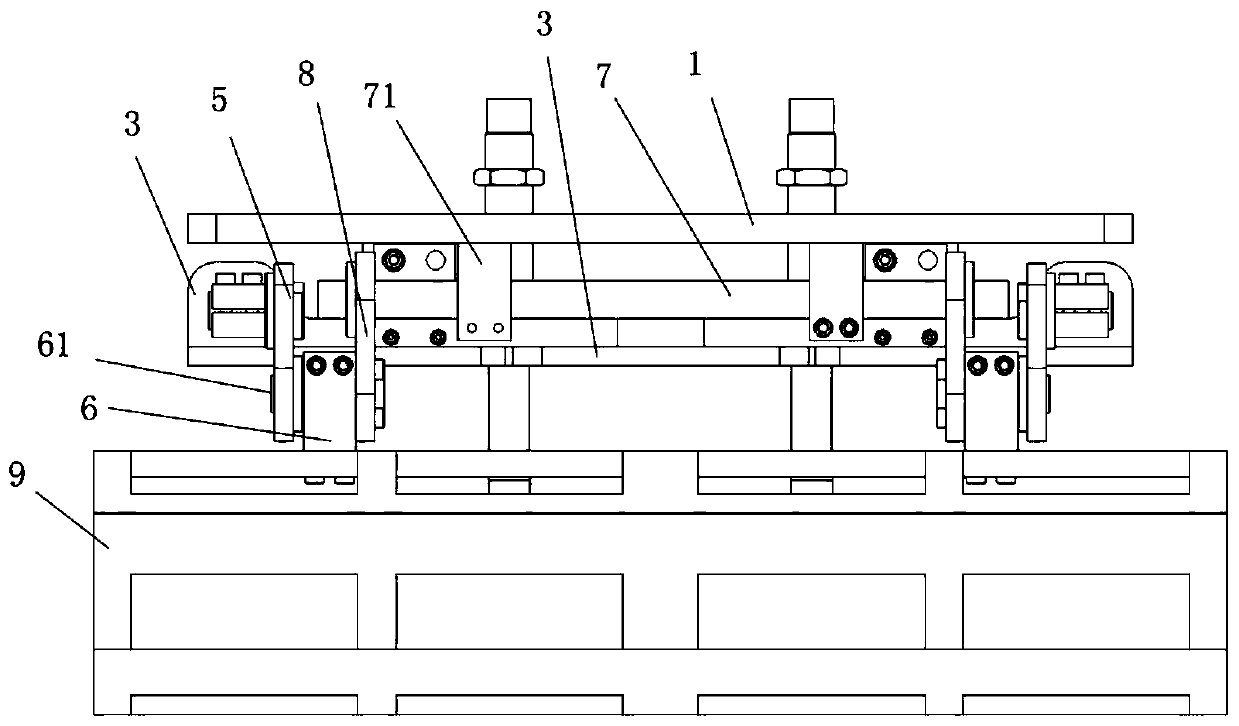
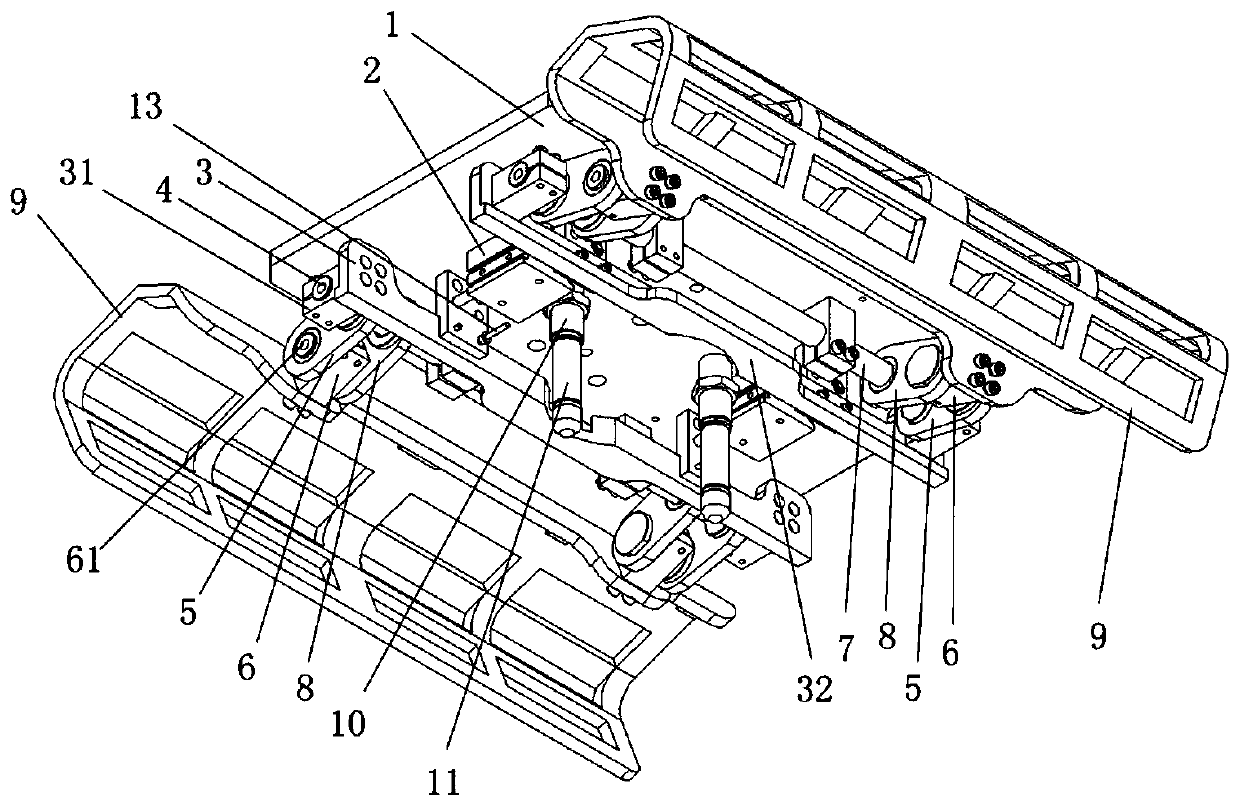
[0021] The invention provides an arm gripper mechanism of an industrial robot, such as Figure 1 ~ Figure 4 As shown, it includes a grip frame 1, a driving device 2, a push firmware 3, a moving arm 5, a fixed arm 8, a fixed shaft 7 and a gripper 9. The driving device 2 is installed at the lower end of the grip frame 1, and the driving device 2 The push rods 21 on the left and right sides are respectively equipped with a pusher 3, and one side of the pusher 3 is provided with a pusher 31, and one end of the moving arm 5 is rotatably installed on the sidewall of the pusher 31, and the other end of the moving arm 5 One end is rotatably installed on one end of the fixed arm 8...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com