GNSS receiver high sampling clock difference resolving method
A receiver clock difference and high-sampling technology, applied in the field of satellite navigation and positioning, can solve the problem of increased solution time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
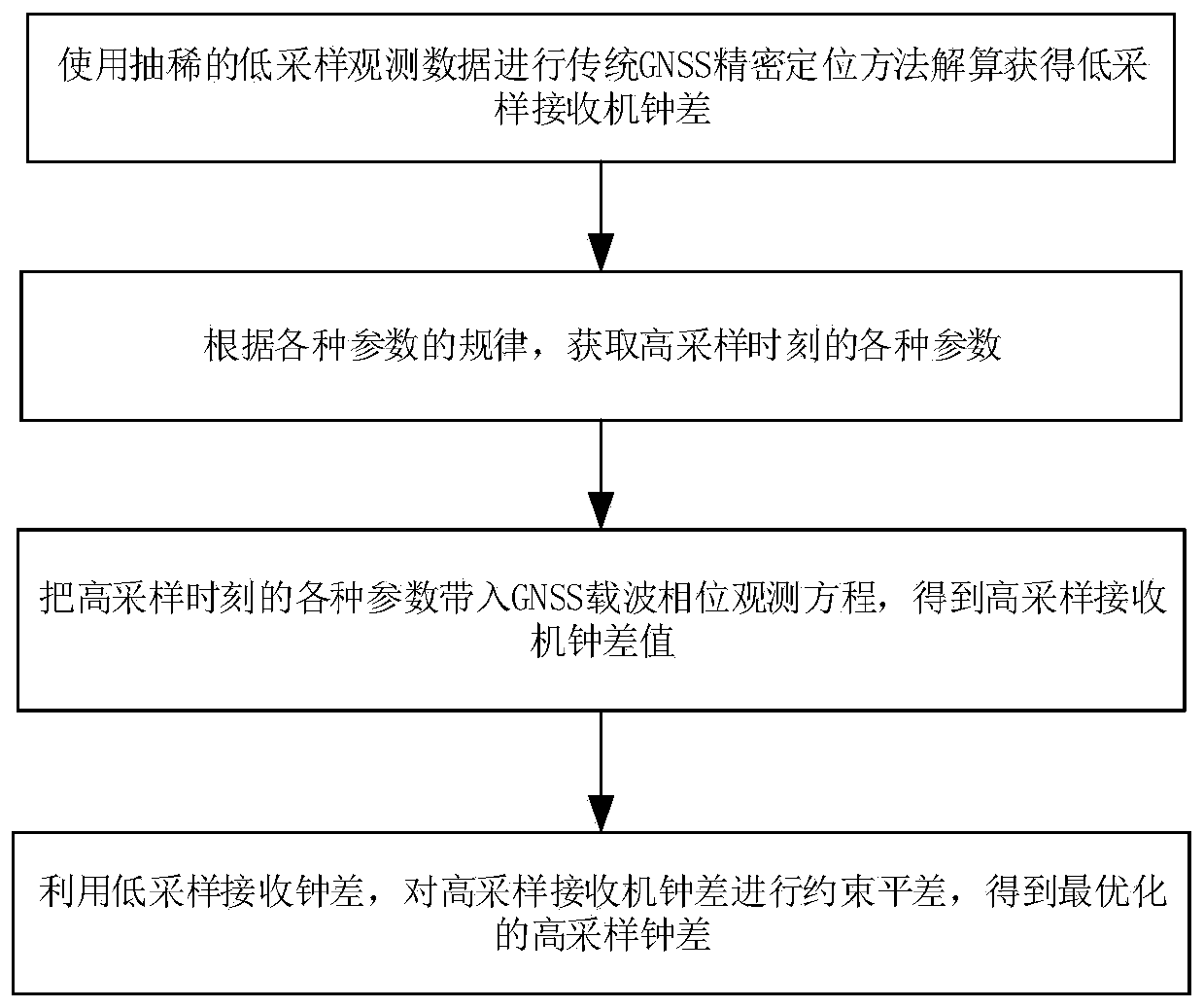
[0056] Such as figure 1 As shown, this embodiment is mainly aimed at the scene of static GNSS receivers on the ground, and proposes a high-sampling clock error calculation method for GNSS receivers. The specific implementation steps are as follows:
[0057] Step 101) Use the traditional method to solve the GNSS Precise Point Positioning (PPP, Precise Point Positioning) on the ground, and the data sampling rate is thinned to a low sampling time interval, which is 30 seconds to 15 minutes in this embodiment.
[0058] The ionosphere-free combination observation equation of GNSS is (Zumberger 1997; Kouba 2001):
[0059]
[0060]
[0061] In the formula,
[0062] is the ionosphere-free combined observation of the carrier phase;
[0063] is the ionosphere-free composite observation value of the code pseudorange;
[0064] is the wavelength of the ionosphere-free combined observation of the carrier phase;
[0065] is the ambiguity of the ionosphere-free combined ob...
Embodiment 2
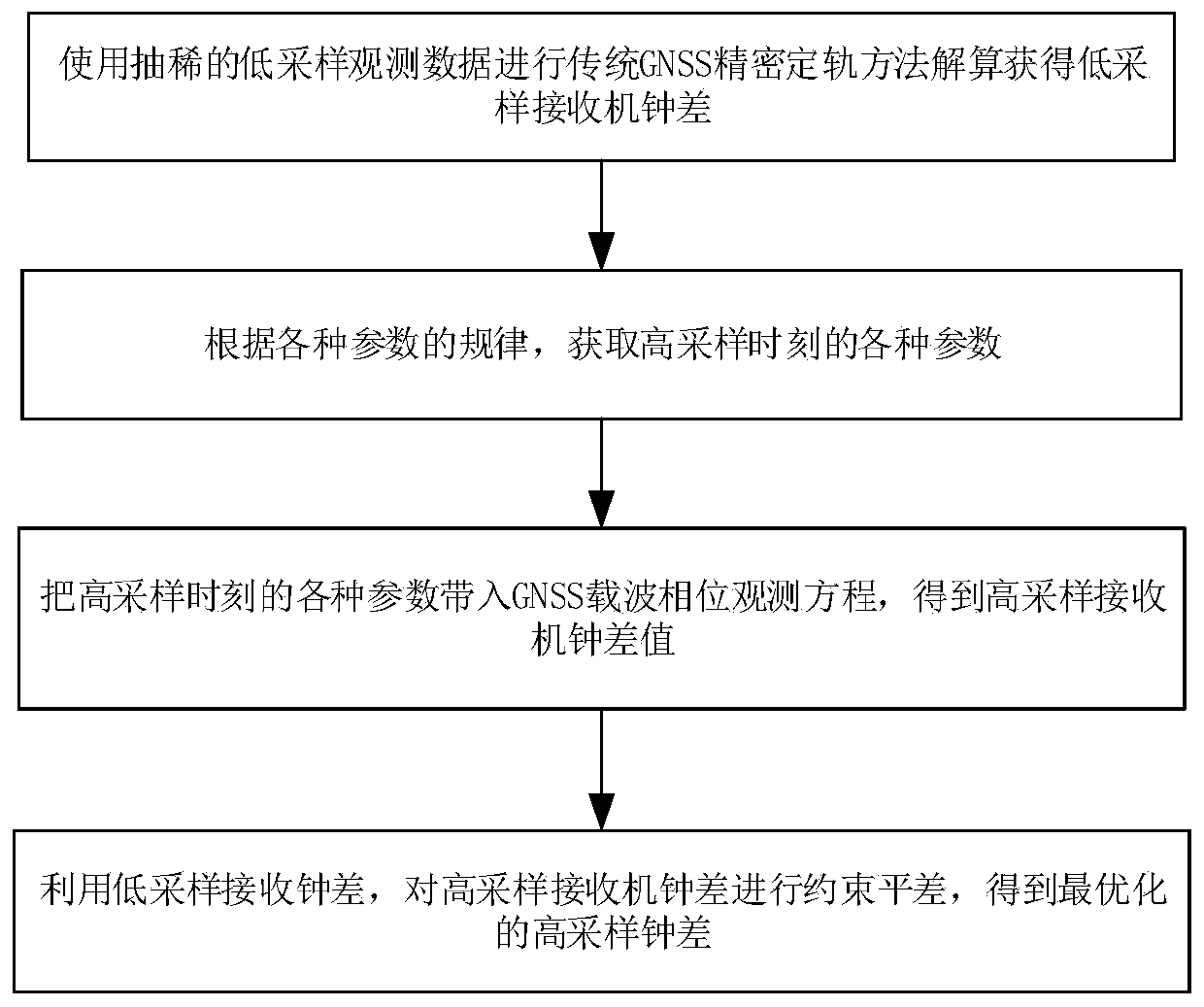
[0115] Such as figure 2 As shown, this embodiment is mainly aimed at the scenario of a space-borne GNSS receiver on a LEO satellite, and proposes a high-sampling clock error calculation method for a GNSS receiver. The specific implementation steps are as follows:
[0116] Step 201) Using the traditional method to solve the LEO precise orbit determination (POD, Precise Orbit Determination) of the spaceborne GNSS.
[0117] The GNSS ionosphere-free combined observation equation for LEO precise orbit determination is similar to that in step 1, the difference is that there is no tropospheric delay term T j ,Specifically:
[0118]
[0119]
[0120] The implication of each parameter in the formula is identical with embodiment 1.
[0121] In LEO precise orbit determination, the state vector contains six parameters of the satellite orbit (a 0 ,e 0 ,i 0 ,Ω 0 ,ω 0 , M 0 ) and force model parameters (light pressure parameters, atmospheric drag parameters, empirical force pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com