Transformer substation inspection robot positioning and navigation system integrated with multiple sensors
An inspection robot, positioning and navigation technology, applied in two-dimensional position/channel control, control/regulation system, instruments and other directions, can solve the problem of insufficient stability of substation inspection robots, achieve stable positioning function and improve stability , rotation robust effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with specific embodiments.
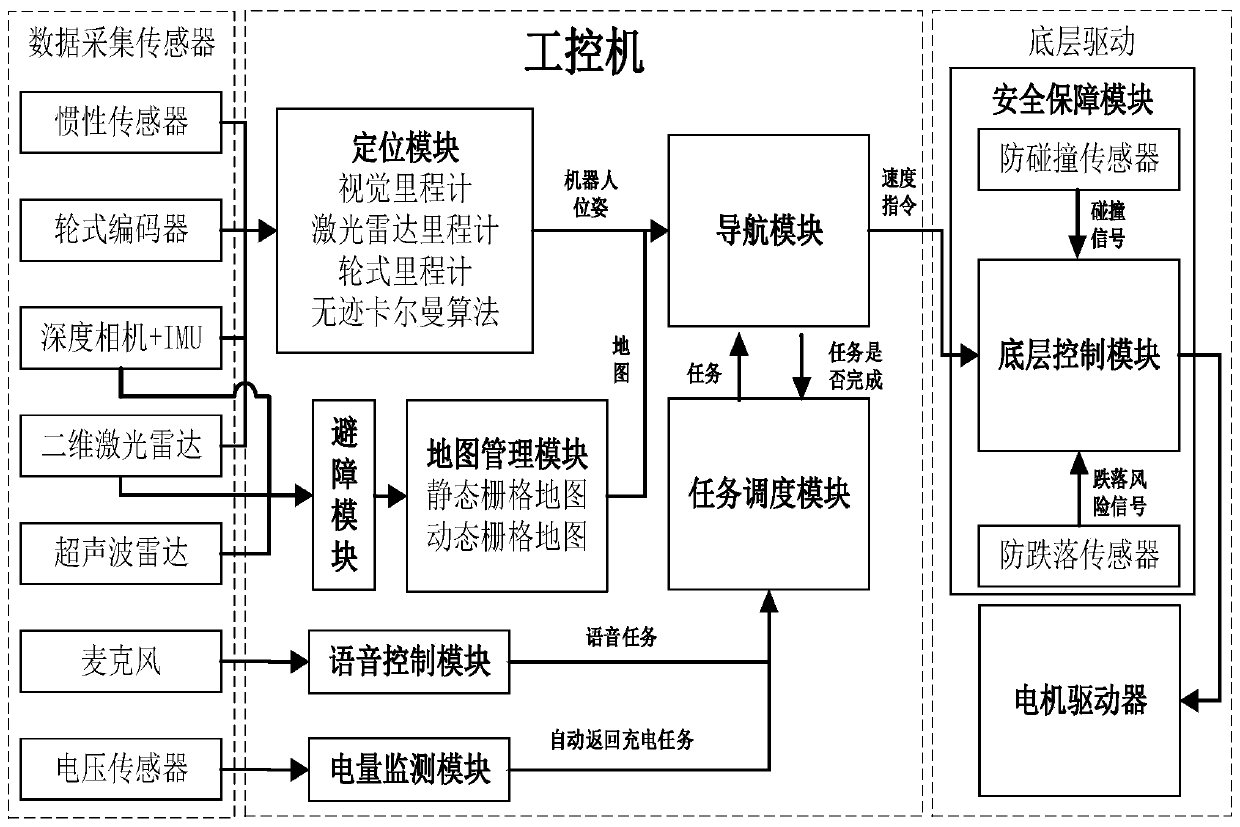
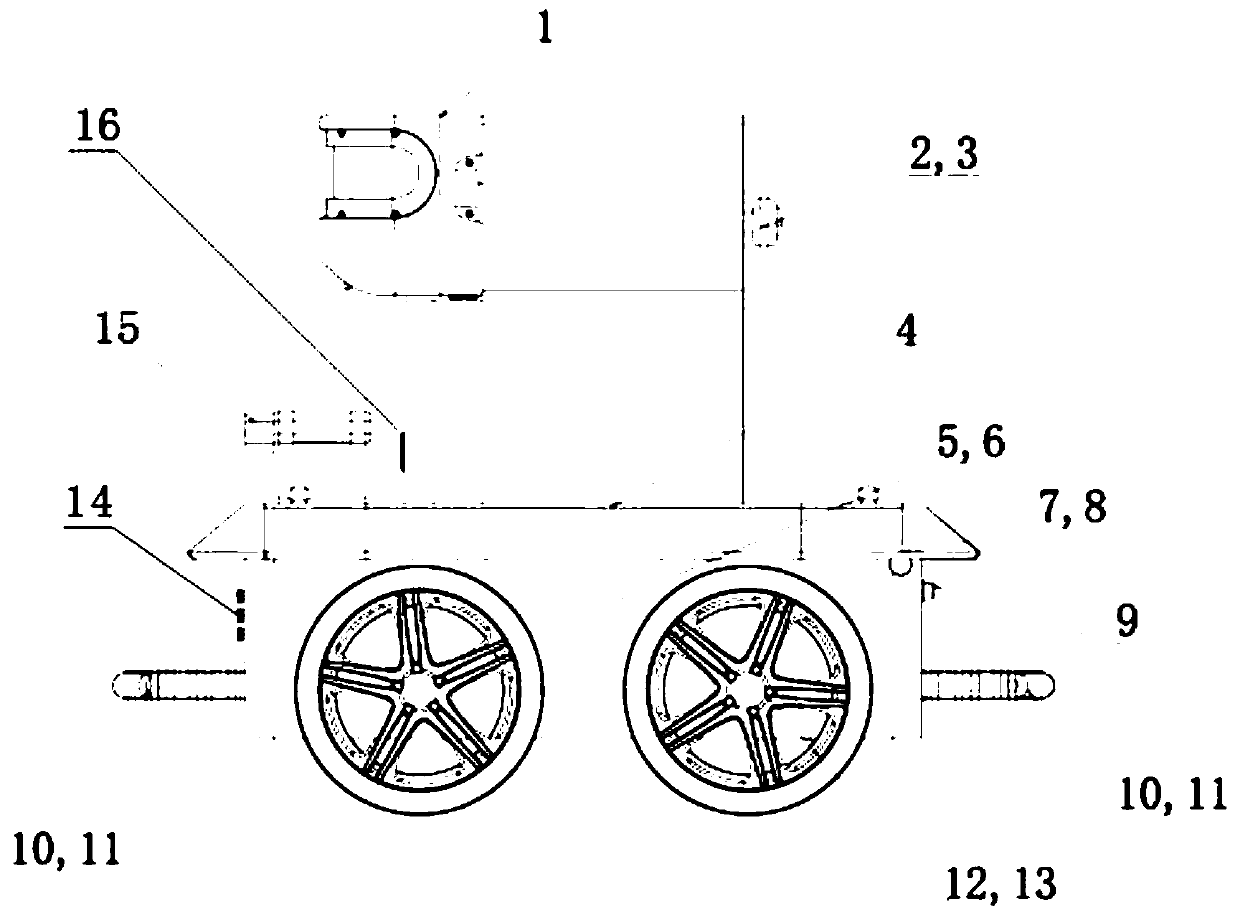
[0041] Such as figure 1 and figure 2 As shown, the multi-sensor fusion substation inspection robot positioning and navigation system provided by this embodiment, the hardware includes a depth camera 15 integrated with an IMU, a two-dimensional laser radar 1, a bottom drive motor 13, a microphone 16, an ultrasonic radar 9, a wheeled Encoder 12, inertial sensor 4, anti-drop sensor 10, anti-collision sensor 11, industrial computer 6, lithium battery 5, emergency stop button 2, robot power switch 3, voltage sensor 7, charging port 8 and its automatic return charging interface 14 . The two-dimensional laser radar 1 and the depth camera 15 with integrated IMU are installed directly in front of the robot, the inertial sensor 4 is installed at the center of mass of the robot, and the microphone 16 is installed directly in front of the robot; the voltage sensor 7 is installed ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com