Control method of anti-interference electric six-degree-of-freedom parallel mechanism
A control method and a technology with a degree of freedom, which is applied in motor control, AC motor control, single motor speed/torque control, etc., can solve problems such as difficult modeling, large amount of calculation, and large change in equivalent mass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
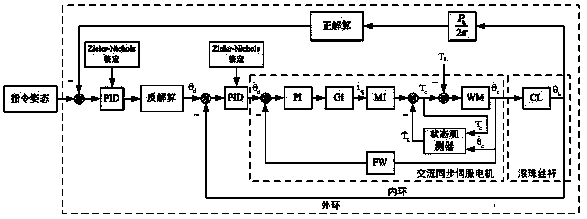
[0075] Such as figure 1 As shown, the present invention discloses a control method for an anti-interference electric six-degree-of-freedom parallel mechanism, which includes the following steps:
[0076] Step 1), the actuator studied in this paper is a linear guide rail actuator driven by a permanent magnet synchronous servo motor, and its transmission part is a ball screw. In this system, the screw drive part is simplified to an ideal model, and the screw drive Partially equivalent to a mathematical model that mainly considers its stiffness, damping and moment of inertia:
[0077] Step 1.1), according to the transmission characteristics of the screw, the torque bala...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com