Multi-state parallel multi-degree-of-freedom motion platform based on piezoelectric driving
A piezoelectric drive and motion platform technology, applied in the field of mechanics, can solve the problems that the platform cannot simultaneously have a large travel range, high positioning accuracy and high dynamic response, and cannot apply a large range of precision tracking, etc., and achieves excellent vibration attenuation performance. Lightweight and compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example 1
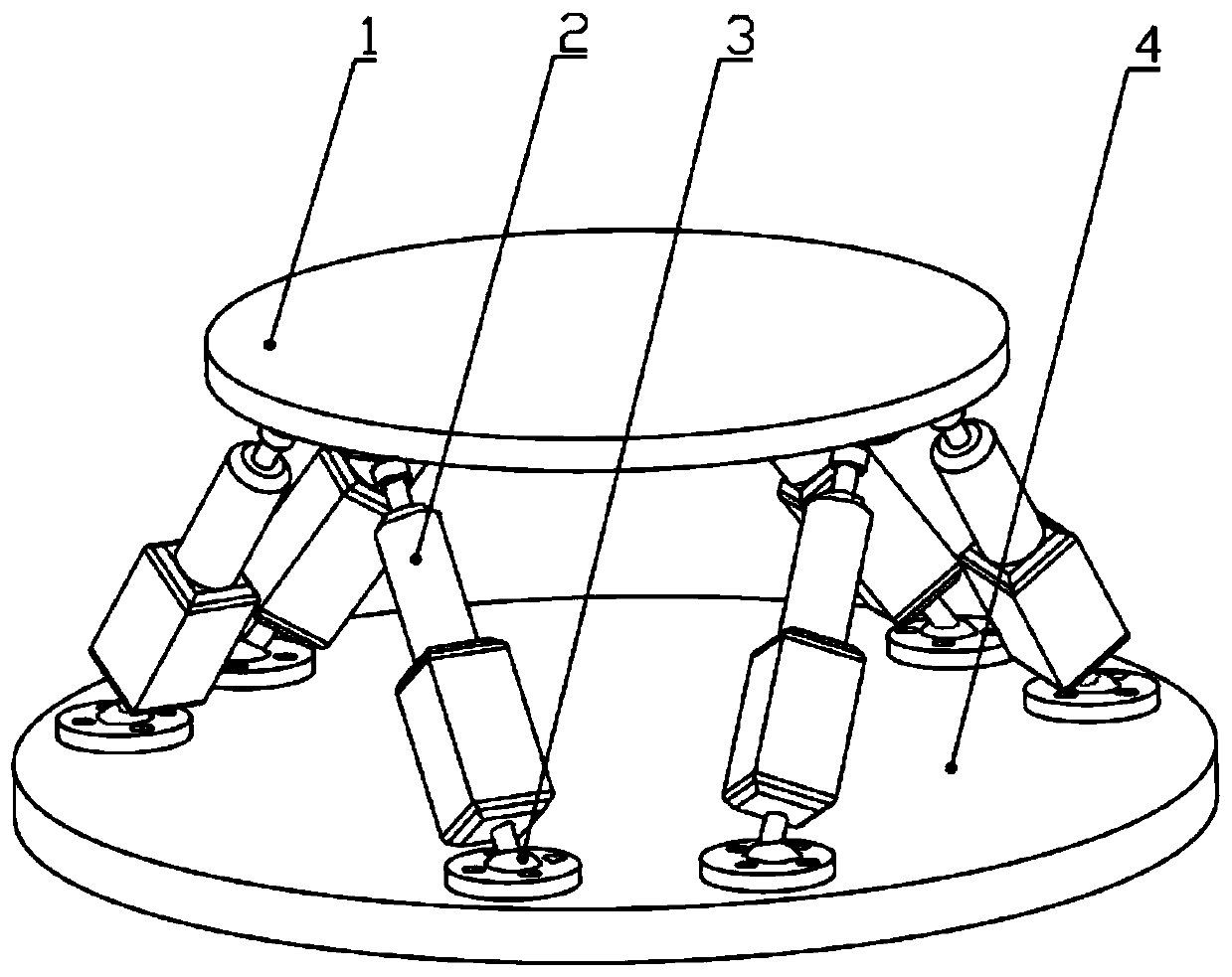
[0018] See attached Figure 1-3 , a multi-state parallel multi-degree-of-freedom motion platform based on piezoelectric drive of the present invention includes:
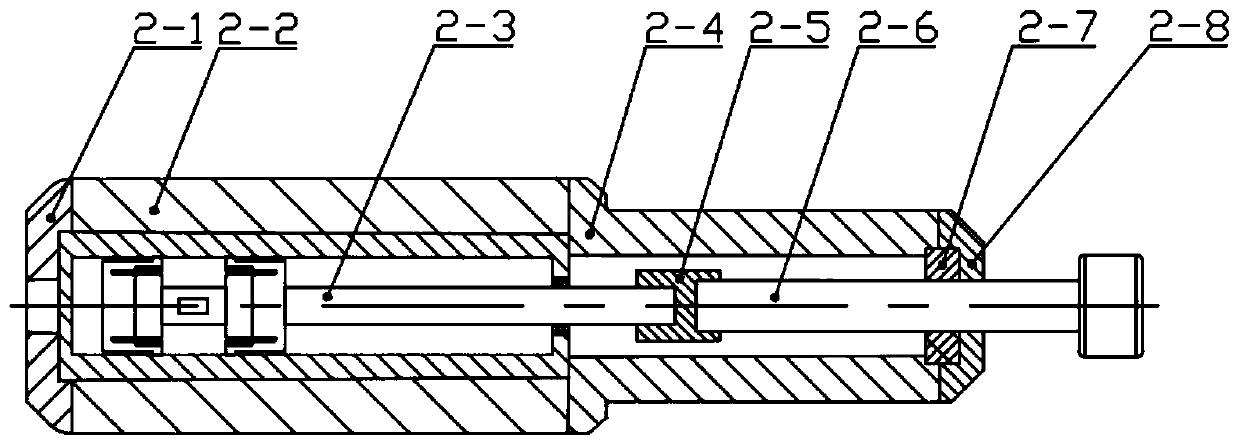
[0019] A static platform 4; a dynamic platform 1 arranged coaxially and parallel to the static platform 4; six linear drive assemblies 2 arranged between the static platform 4 and the dynamic platform 1, and each linear drive assembly 2 ends through a spherical bearing 3 They are respectively connected to the lower end surface of the moving platform 1 and the upper end surface of the static platform 4; the linear drive assembly 2 includes an end cover 2-1, an actuator protective case 2-2, a piezoelectric inchworm actuator 2-3, and an output shaft Housing 2-4, coupling 2-5, output shaft 2-6, bearing 2-7, bearing end cover 2-8, the position of the piezoelectric inchworm actuator 2-3 is determined by the end cover 2-1 It is fixed with the output shaft shell 2-4, the actuator actuating shaft 2-3-8 is connected with the ...
Embodiment approach
[0022] As a preferred embodiment of the present invention, specifically as follows:
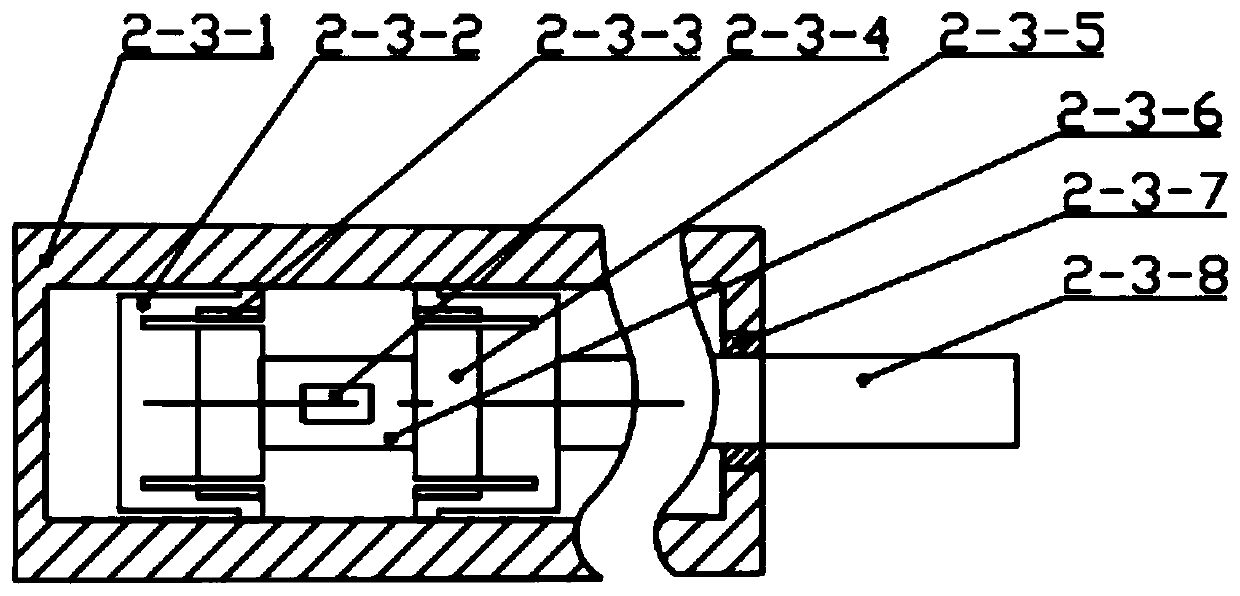
[0023] In the first step, the electromagnet 2-3-5 of the second clamping mechanism is energized, and the magnetic force is applied to attract the armature 2-3-3, and the armature drives the flexible part 2-3-2 to separate from the track 2-3-1. The second clamping mechanism releases the clamping state;
[0024] In the second step, the extension piezoelectric stack 2-3-6 is energized and extended, and the displacement is output, and the actuating shaft 2-3-8 is moved outward by one step;
[0025] In the third step, after the elongation of the piezoelectric stack 2-3-6 is complete, the second clamping electromagnet 2-3-5 is powered off and loses its magnetic force, and the armature 2-3-3 and the flexible part 2-3-2 recover In the original position, the second clamping mechanism resumes clamping;
[0026] In the fourth step, the first clamping electromagnet 2-3-5 is energized to attract the arm...
Embodiment example 2
[0030] The difference between this implementation case and implementation case 1 lies in the movement form of the actuator, as follows:
[0031] The first clamping mechanism is always in the clamping state, and the second clamping mechanism is always in the unclamping state. At this time, the actuator is in the scanning state, also known as the linear state. Whether the extension piezoelectric stack 2-3-6 is powered is determined by the outside The controller decides that at this time, the displacement of the actuator is small, the response is fast, and the precision is high, which can realize the vibration isolation positioning function of the multi-degree-of-freedom parallel motion platform.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com