


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A method and system for laser-imu external parameter calibration
One-IMU and laser technology, applied in the field of robots, can solve the problems of large manual measurement error, difficult access to mechanical external parameters, and troublesome measurement, so as to improve accuracy, reduce the influence of accidental factors, and solve the effect of motion distortion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0119] This embodiment provides a system for laser-IMU external parameter calibration, including:
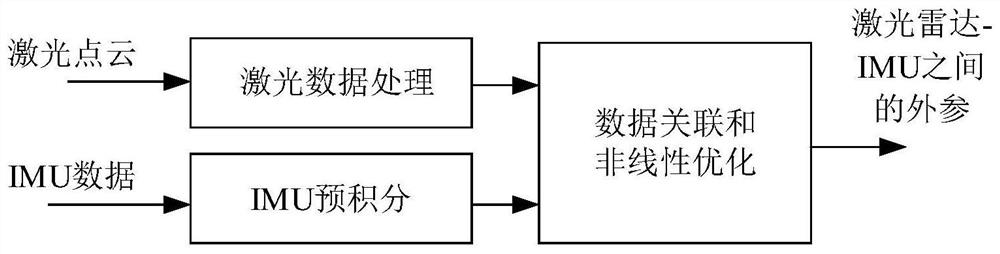
[0120] Data acquisition module: used to acquire IMU measurement data and laser radar measurement data;
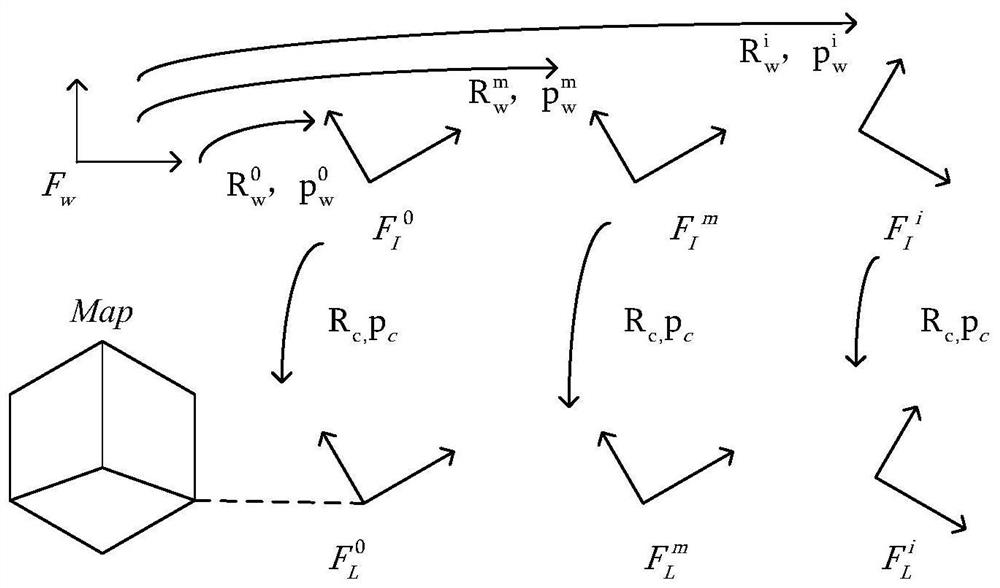
[0121] The first data processing module: used to perform IMU pre-integration on the obtained IMU measurement data, calculate and obtain the estimated value of IMU pose transformation relative to the initial pose of the IMU at the next moment, according to the estimated value and the actual measured value of the IMU at the next moment , to obtain the association residual of the data association;
[0122] The second data processing module: used to process the measurement data of the laser radar, use the IMU pre-integration to re-project multiple laser radar points to the projection coordinates of the world coordinate system, and calculate the weight of each laser radar point to the calibration target map projection error;
[0123] Calculation module of external parameter cali...
Embodiment 3
[0125] This embodiment provides an electronic device, including a memory, a processor, and computer instructions stored in the memory and executed on the processor. When the computer instructions are executed by the processor, the steps described in the method in Embodiment 1 are completed.
Embodiment 4
[0127] This embodiment provides a computer-readable storage medium for storing computer instructions, and when the computer instructions are executed by a processor, the steps described in the method in Embodiment 1 are completed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com