Automatic driving data labeling method, cloud control platform and storage medium
A self-driving, cloud-controlled technology, applied in the field of data labeling, can solve the problems that are difficult to be used to determine whether the self-driving vehicle is running normally, and it is difficult to be used to test the self-driving vehicle, so as to achieve the effect of improving the value of data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
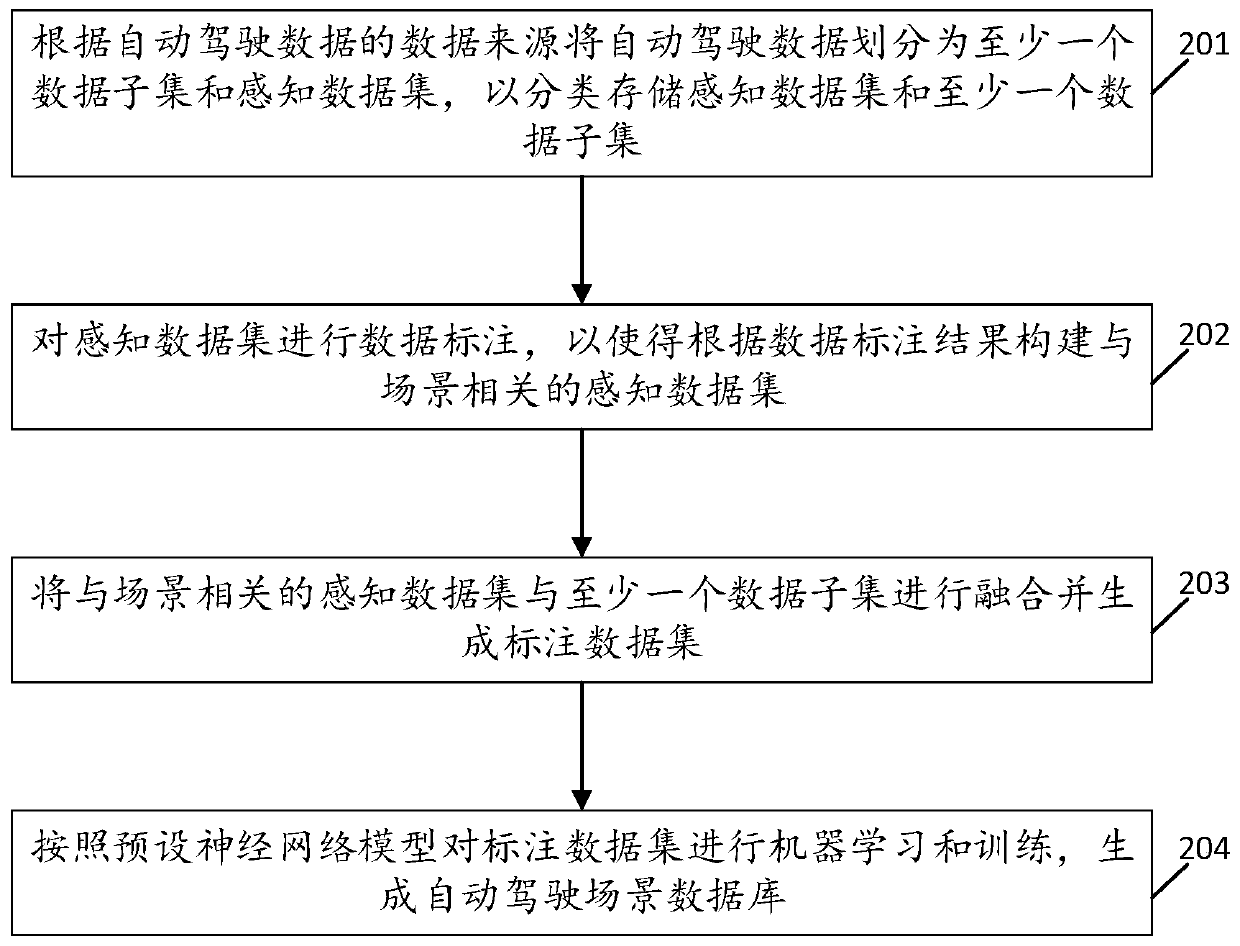
[0065] see figure 2 , figure 2 It is a schematic flowchart of a method for labeling automatic driving data provided in the embodiment of the present application. Such as figure 2 As shown, the method includes the steps of:
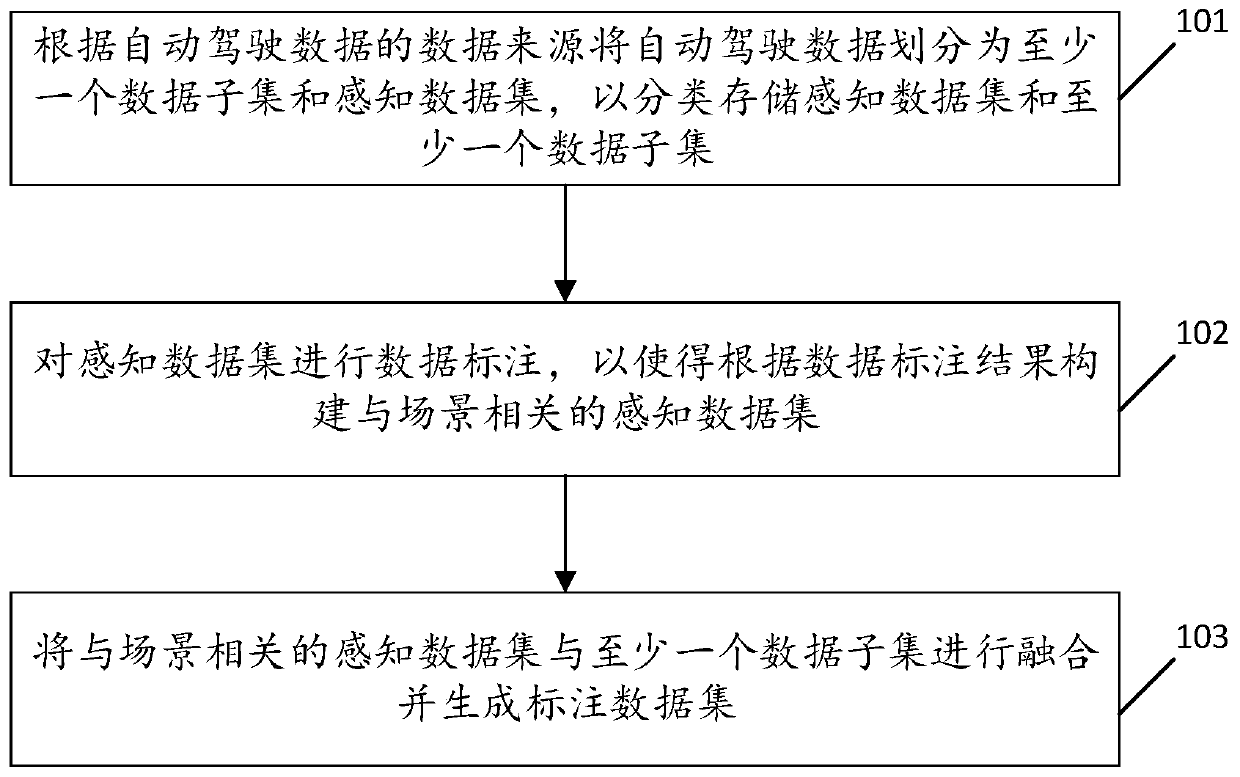
[0066] 201. Divide the autopilot data into at least one data subset and a perception dataset according to the data source of the autopilot data, so as to classify and store the perception dataset and at least one data subset;
[0067] 202. Carry out data labeling on the perception dataset, so as to construct a scene-related perception dataset according to the data labeling result;
[0068] 203. Fuse the perception data set related to the scene with at least one data subset to generate a labeled data set;
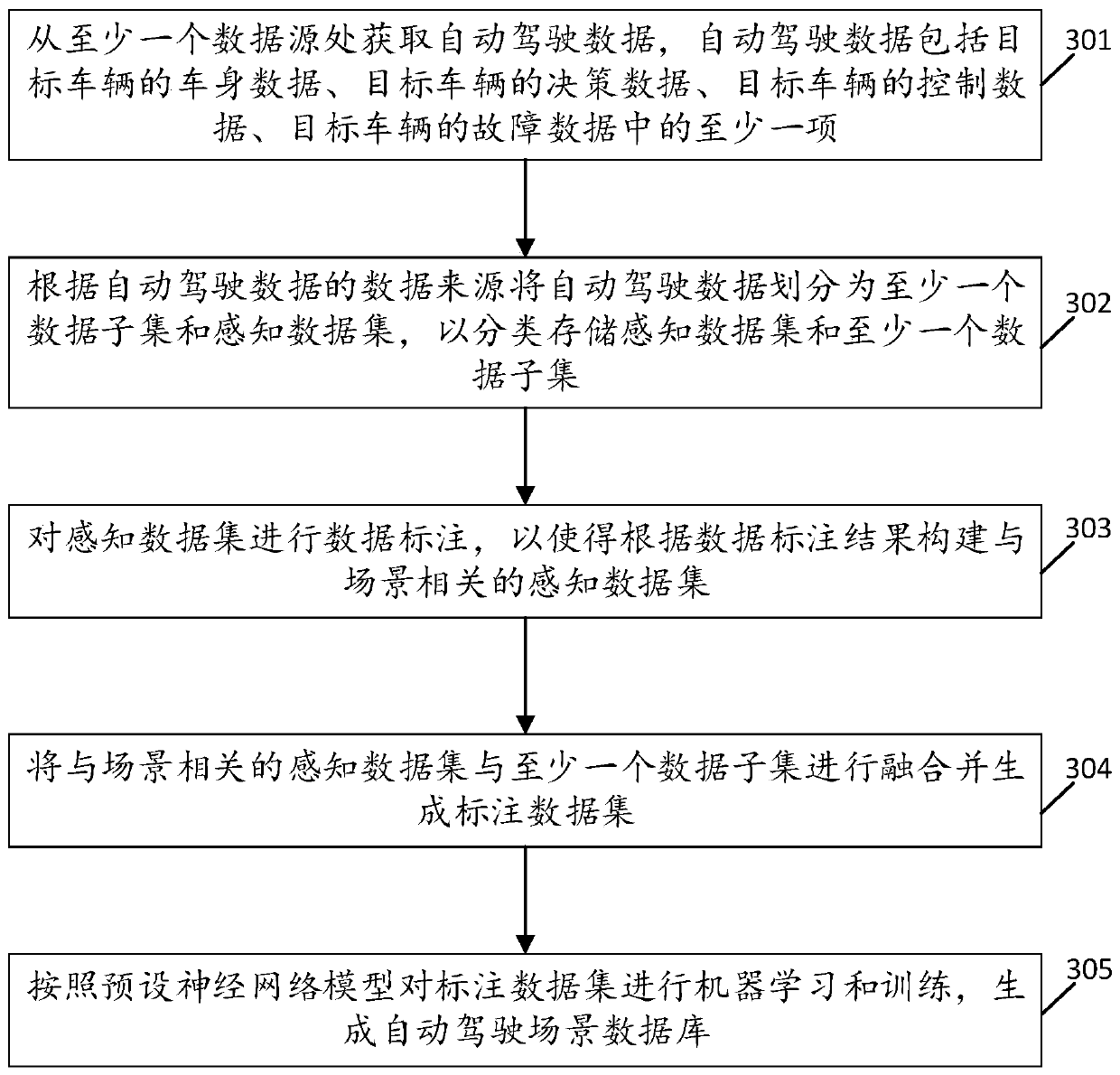
[0069] 204. Perform machine learning and training on the labeled data set according to the preset neural network model to generate an automatic driving scene database.
[0070] In the embodiment of the present application, after the labeled data ...
Embodiment 3
[0076] see image 3 , image 3 It is a schematic flowchart of a method for labeling automatic driving data provided in the embodiment of the present application. Such as image 3 As shown, the method includes the steps of:
[0077] 301. Acquire automatic driving data from at least one data source, where the automatic driving data includes at least one of target vehicle body data, target vehicle decision data, target vehicle control data, and target vehicle fault data.
[0078] 302. Divide the autopilot data into at least one data subset and a perception dataset according to the data source of the autopilot data, so as to classify and store the perception dataset and at least one data subset;
[0079] 303. Carry out data labeling on the perception dataset, so as to construct a scene-related perception dataset according to the data labeling result;
[0080] 304. Fuse the perception data set related to the scene with at least one data subset to generate a labeled data set;
...
Embodiment 4
[0084] see Figure 4 , Figure 4 It is a schematic flowchart of a method for labeling automatic driving data provided in the embodiment of the present application. Such as Figure 4 As shown, the method includes the steps of:
[0085] 401. Acquire automatic driving data from at least one data source, where the automatic driving data includes at least one of target vehicle body data, target vehicle decision data, target vehicle control data, and target vehicle fault data.
[0086] 402. Divide the autopilot data into at least one data subset and a perception dataset according to the data source of the autopilot data, so as to classify and store the perception dataset and at least one data subset;
[0087] 403. Verify the sensing data set according to a preset verification rule, so as to generate a verified sensing data set;
[0088] 404. Perform serialization processing on the verified sensing data set according to the preset location serialization rules;
[0089] 405. Perf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com