A Lidar Online Calibration Method for Autopilot System Fused with Vehicle Information
A lidar and autonomous driving technology, applied in neural learning methods, radio wave measurement systems, instruments, etc., can solve problems such as unmanned development, lack of accurate external parameters, and inability to implement online, to improve safety and ease of use. The effect of engineering practical, improving the accuracy and reliability of environmental perception
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The present invention will be described in further detail below in conjunction with the embodiments given in the accompanying drawings.
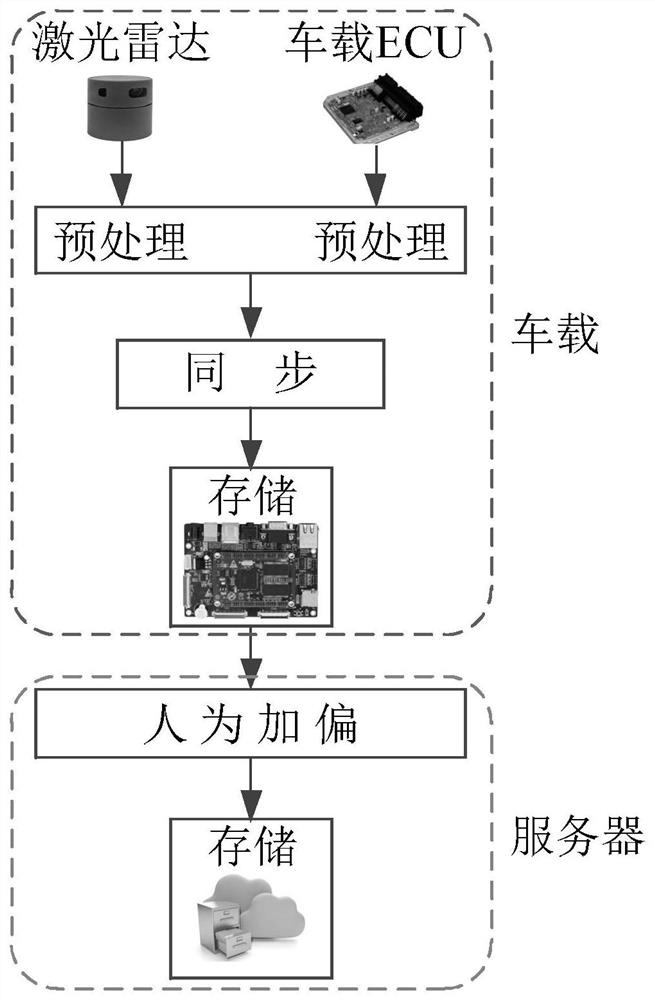
[0047] Such as figure 1As shown, the autopilot-related hardware involved in the present invention includes a laser radar, a vehicle-mounted ECU (Electric Control Unit, electronic control unit) and a computing unit. Among them, lidar is used for obstacle detection in the automatic driving system. It will feed back the detected point cloud information to the automatic driving system in real time. The obstacle detection algorithm of automatic driving analyzes the type and position of obstacles based on the point cloud information. The on-board ECU belongs to the original vehicle equipment, and will send out the current vehicle speed, steering wheel angle information and INS (Inertial Navigation System, inertial navigation system) information through the CAN (Controller AeraNetwork, Controller Area Network) bus. Wherein, the INS informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com