


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Target countering method based on unmanned aerial vehicle and related equipment thereof
A technology of unmanned aerial vehicles and control methods, applied in the field of unmanned aerial vehicles, can solve problems such as misjudgment, low accuracy, and false interference, and achieve the effect of eliminating misjudgment and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
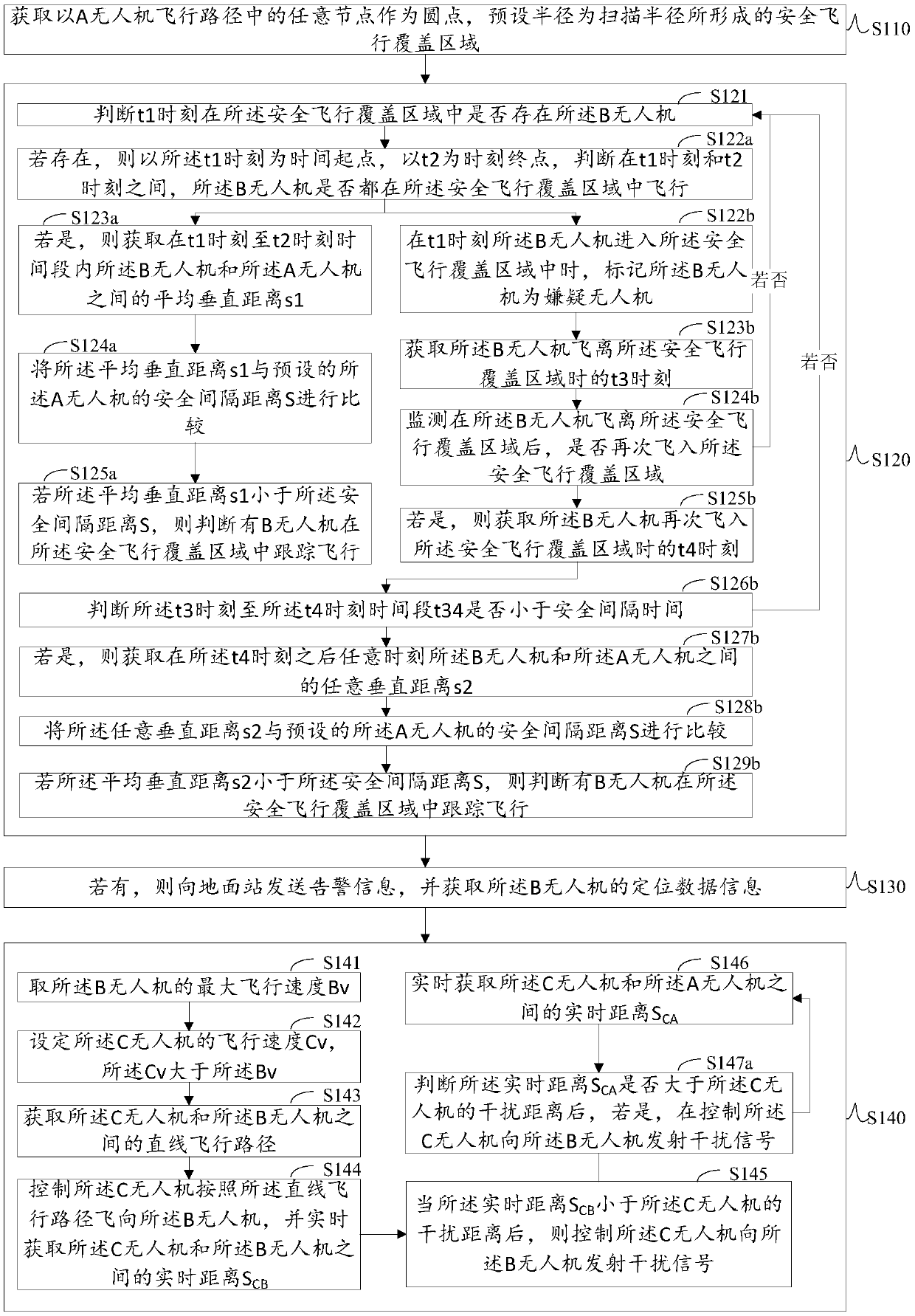
[0036] Embodiment 1 of the present invention provides a UAV-based target countermeasure method, please refer to Figure 1-2 , the method includes:
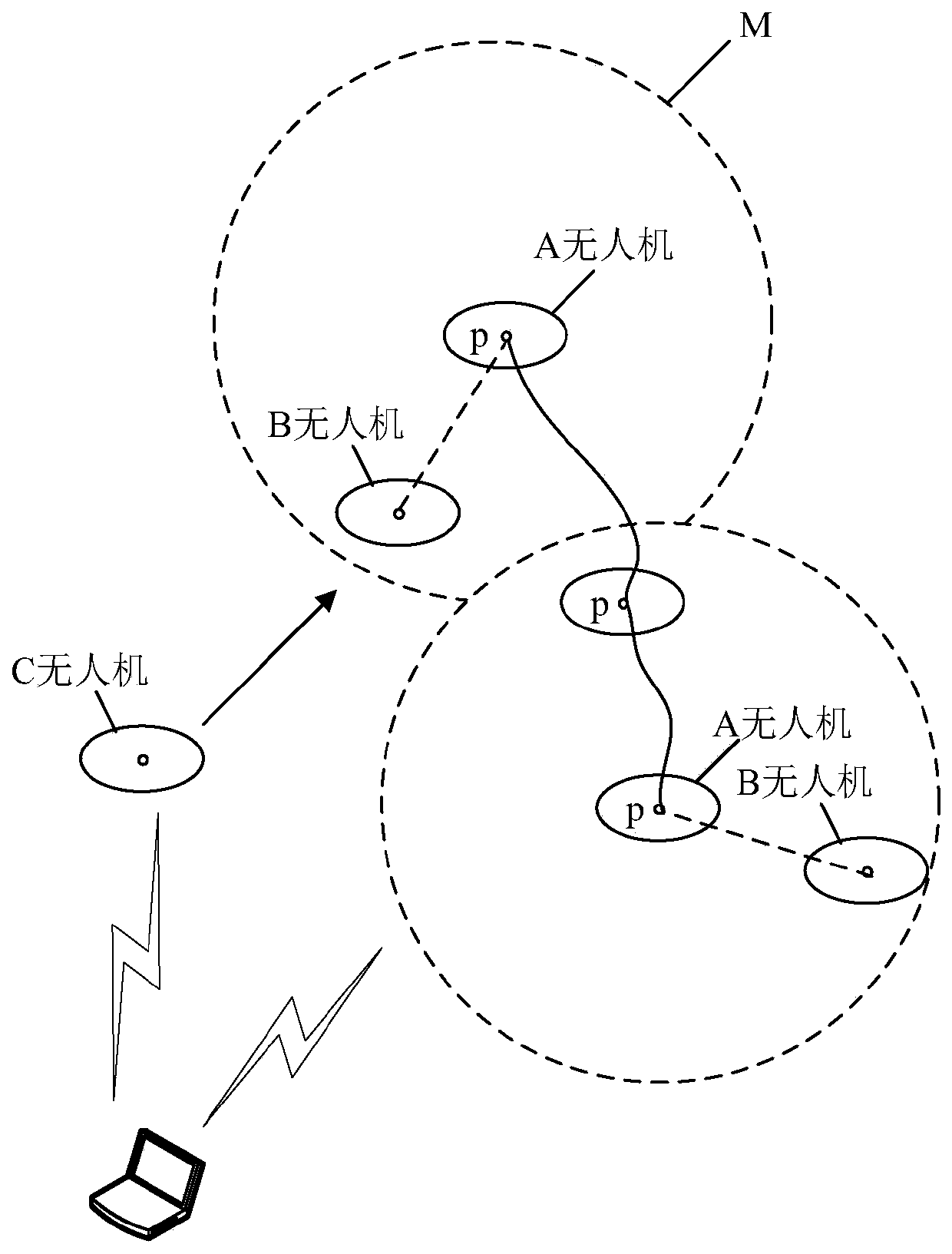
[0037] S110. Obtain a safe flight coverage area formed by using any node in the flight path of the UAV A as a dot, and the preset radius is the scanning radius;
[0038] S120, judging whether there is a UAV B tracking and flying in the safe flight coverage area;
[0039] S130. If yes, send an alarm message to the ground station, and obtain the positioning data information of the B UAV;
[0040] S140. According to the positioning data information, control the UAV C to take off, and fly to the UAV B to counter the UAV B.
[0041] According to the inventor's research, the existing drones are low, small and slow aircraft. The method of countering drones is usually to determine the suspect through the radar detection system when a suspected drone is found to track our drone flight. The position of the UAV is identified through the m...
Embodiment 2
[0082] Embodiment 2 of the present invention provides a system, the system includes: a flight coverage area forming module, configured to obtain any node in the flight path of the UAV A as a dot, and the preset radius is the scanning radius. Flight coverage area; tracking flight judgment module, configured to judge whether there is a B unmanned aerial vehicle tracking flight in the safe flight coverage area; warning information sending module, configured to send warning information to the ground station if so, and Obtain the positioning data information of the B drone; the countermeasure module is configured to control the C drone to take off according to the positioning data information, and fly to the B drone to attack the B drone To counter.
[0083] In the second embodiment of the present invention, the tracking flight judging module specifically includes: a first tracking flight judging sub-module configured to judge whether the B drone exists in the safe flight coverage ...
Embodiment 3
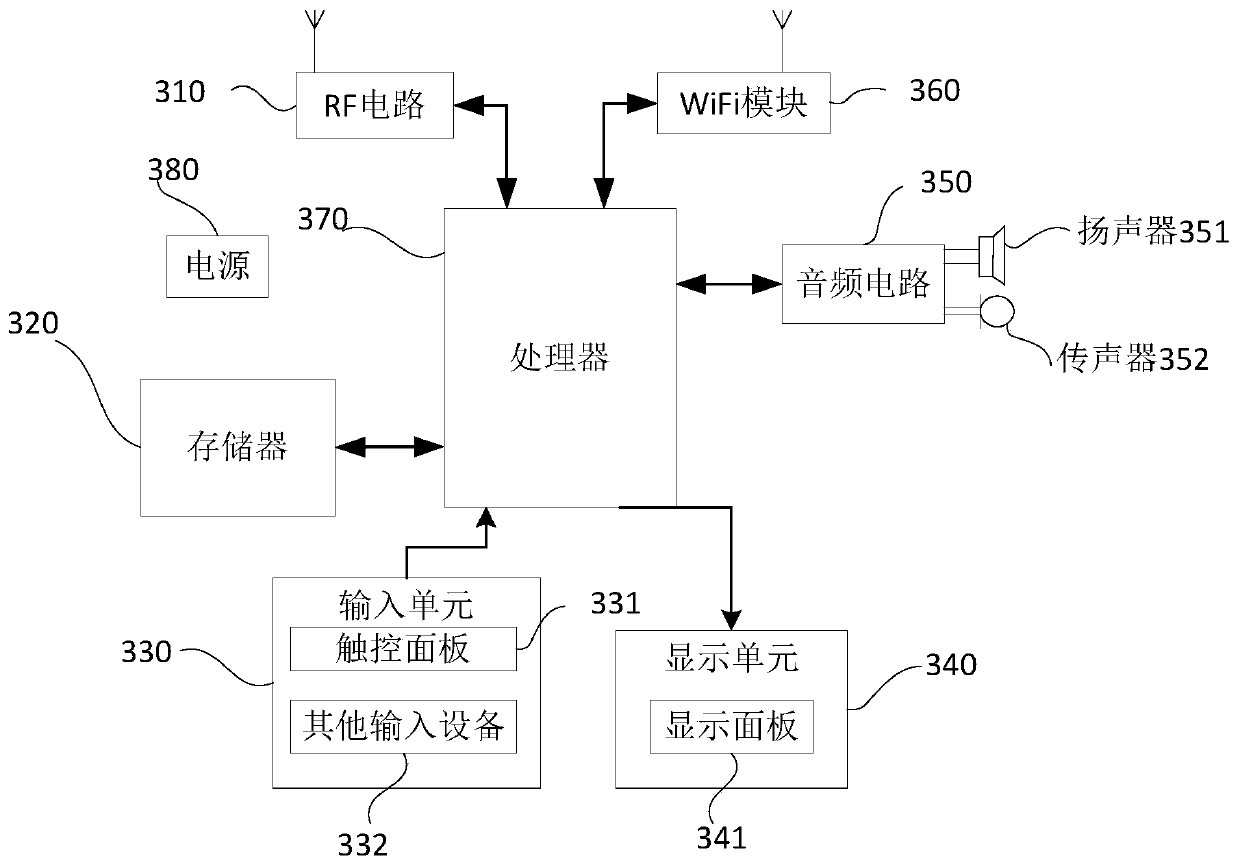
[0088]It should be noted that, based on the same inventive communication as the first and second embodiments above, the third embodiment of the present invention provides a device, including: a radio frequency (Radio Frequency, RF) circuit 310, a memory 320, an input unit 330, a display Unit 340, audio circuit 350, WiFi module 360, processor 370, and power supply 380 and other components. Wherein, the memory 320 stores a computer program that can run on the processor 370, and the processor 370 implements the steps described in the first embodiment when executing the computer program.
[0089] In a specific implementation process, when the processor executes the computer program, any implementation manner in Embodiment 1 and Embodiment 2 may be implemented.
[0090] Those skilled in the art can understand that, image 3 The structure of the device shown in the device does not constitute a limitation to the device itself, and may include more or less components than shown in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com