A robust adaptive decoupling control method for aerial remote sensing inertial stabilization platform
An inertial stable platform, robust self-adaptive technology, applied in the direction of self-adaptive control, general control system, control/adjustment system, etc., can solve the problem of insufficient coupling torque suppression ability between the carrier and the frame, and achieve easy programming and stable The effect of improved accuracy and concise decoupling algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
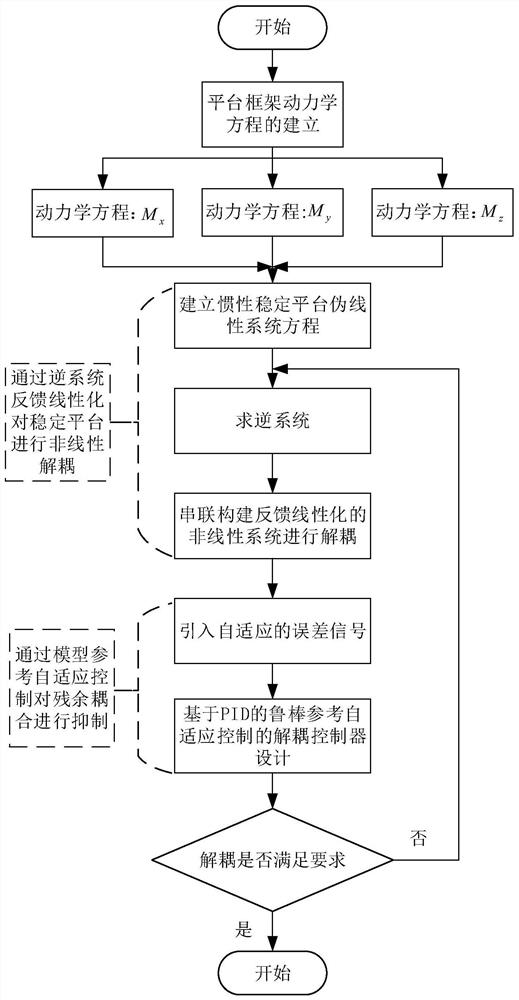
[0048] Such as figure 1 shown, according to figure 1 The flow chart of the decoupling control method, and the specific implementation method of the present invention are as follows.
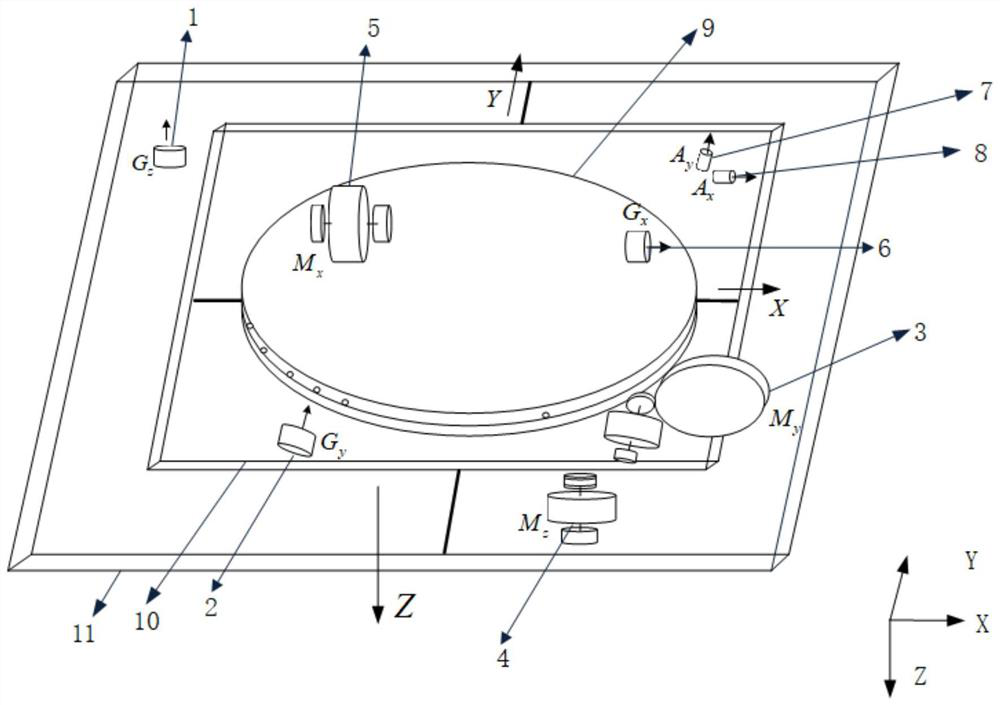
[0049] Such as figure 2 As shown, the mechanical structure of the aerial remote sensing inertial stabilization platform includes azimuth frame rate gyro 1, roll frame rate gyro 2, roll frame torque motor 3, azimuth frame torque motor 4, pitch frame torque motor 5, pitch frame rate gyro 6, Accelerometer y 7, accelerometer x 8, pitch frame 9, roll frame 10, azimuth frame 11. The aerial remote sensing inertial stabilization platform is used for three-axis imaging stabilization, and its three-axis frames are pitch frame 9, roll frame 10 and azimuth frame 11 respectively. The pitching frame rate gyroscope 6 and the pitching frame torque motor 5 are fixed on the pitc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com