Underwater robot pure orientation target estimation method
An underwater robot and robot technology, applied in underwater operation equipment, navigation computing tools, systems for determining direction or offset, etc., to achieve the effects of enhanced observability, simple practice, and improved observability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with accompanying drawing.
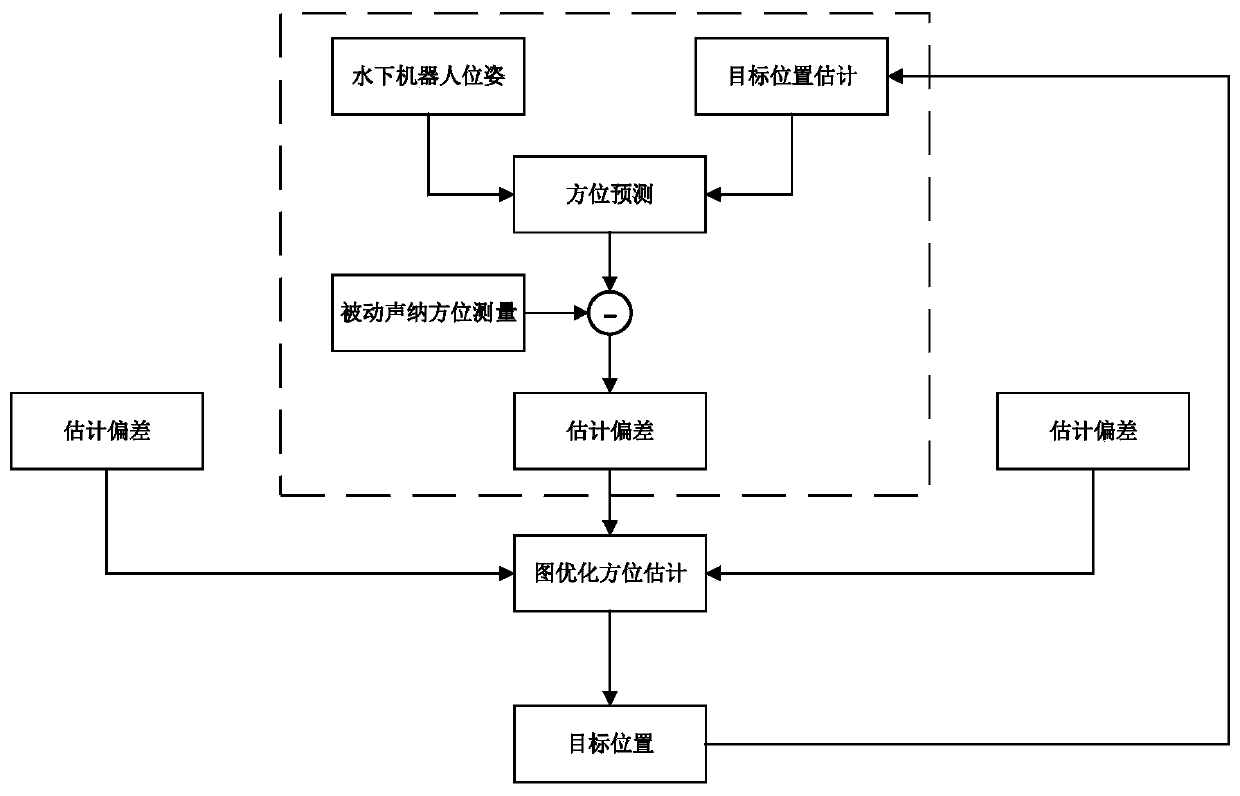
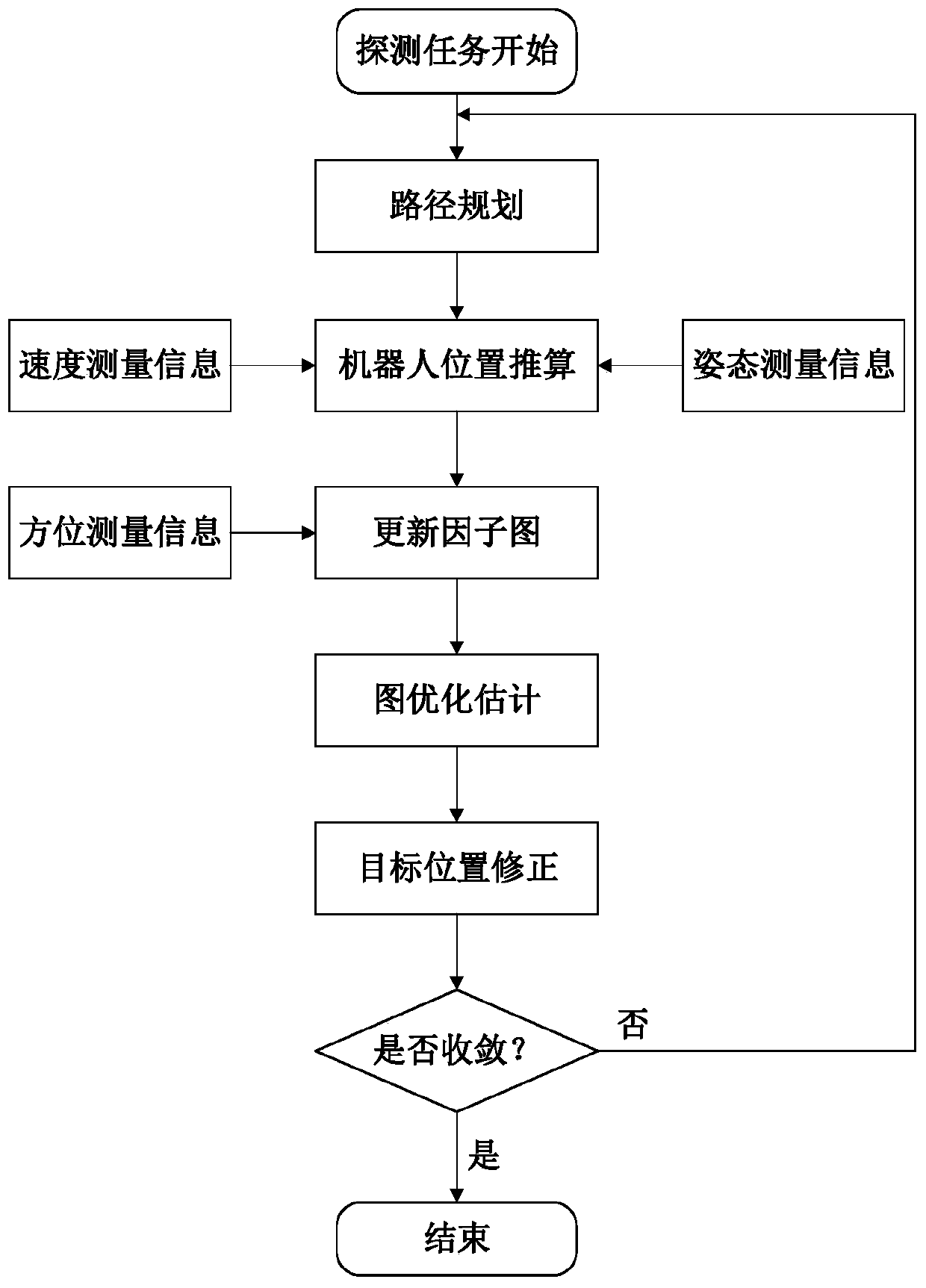
[0023] combine figure 1 , the underwater robot target estimation system structure is as follows:
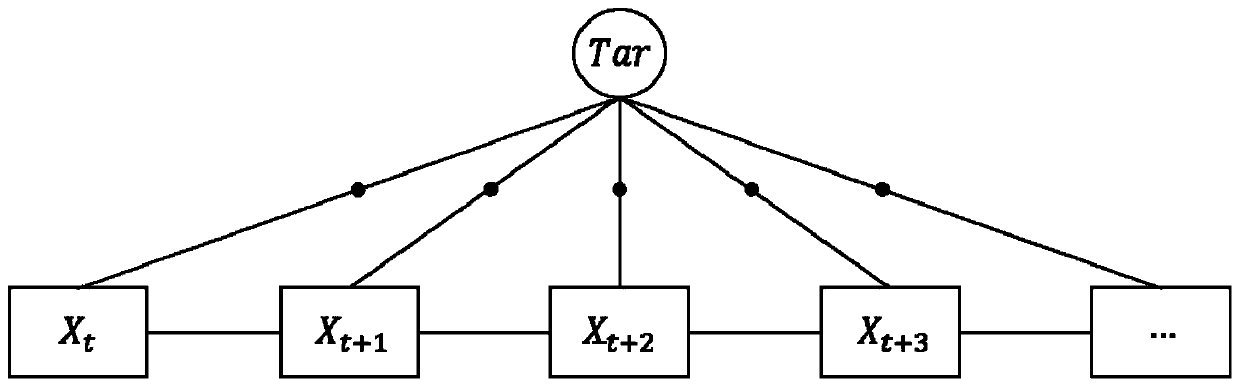
[0024] like figure 1 As shown, the underwater robot target estimation system structure includes graph optimization estimation module, path planning module, passive sonar detection module, dead reckoning module and so on. The underwater robot uses the pure orientation information of the target provided by the passive sonar and the orientation estimation information based on the dead reckoning module to establish a graph model of the target estimation, and combines the estimation module based on the graph optimization to complete the nonlinear optimal estimation and realize the orientation-only target. position estimate.
[0025] Graph optimization estimation module: use the orientation measurement information of the target and the position information of the underw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com