


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
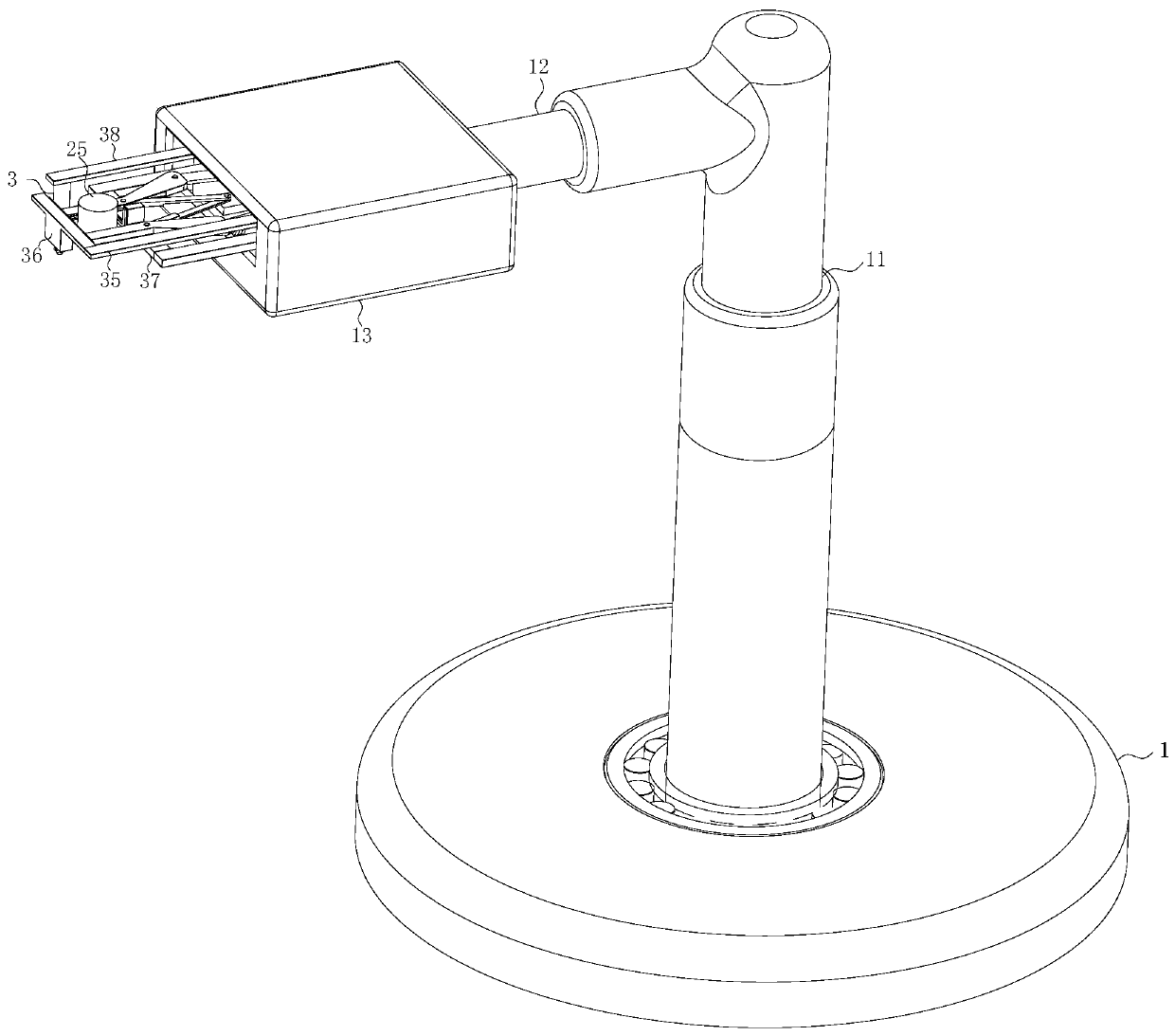
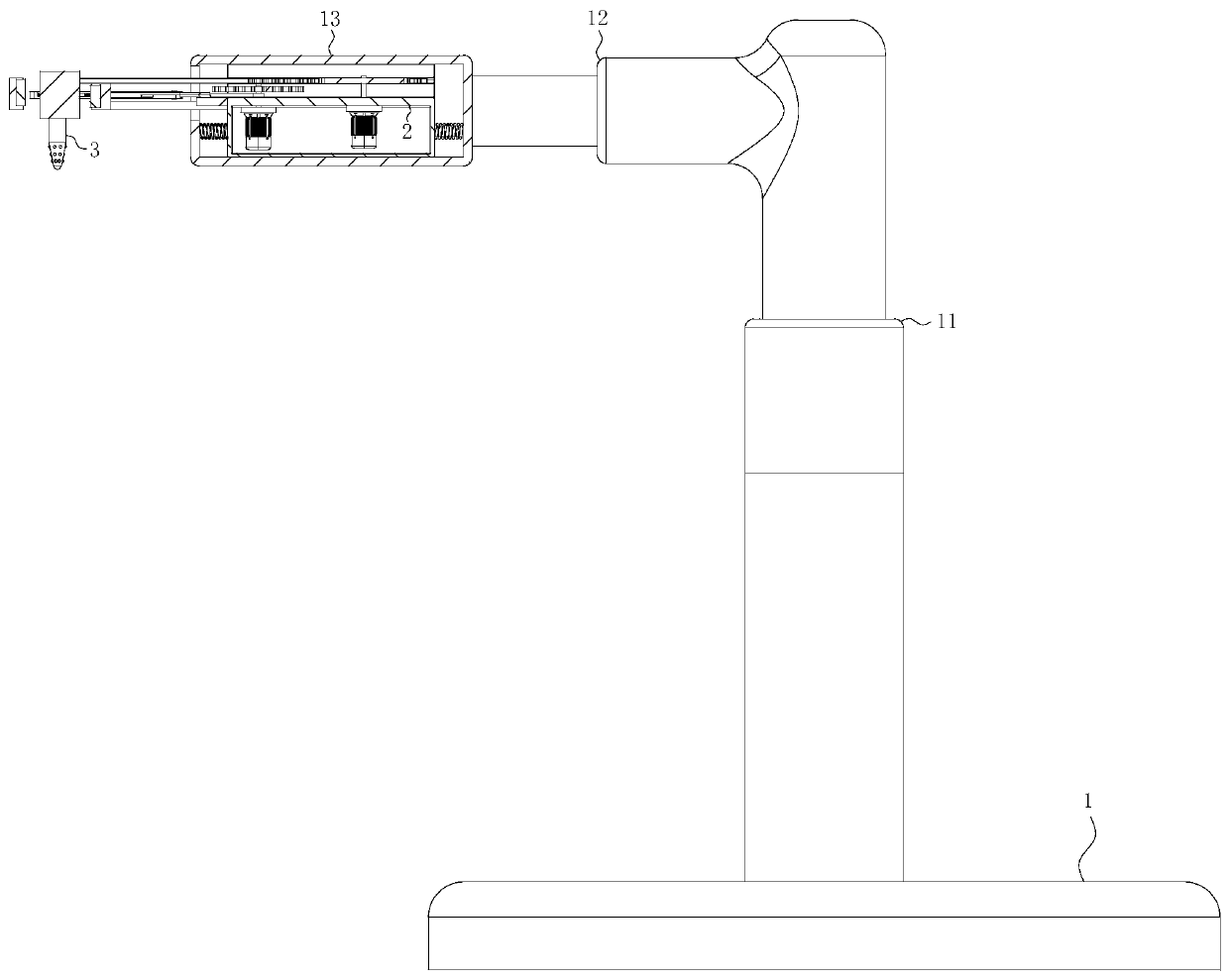
Robot carrying gripper capable of realizing accurate positioning of workpiece
A precise positioning and robot technology, applied in the field of manipulators, can solve the problems of unbalanced clamping force, no positioning pin insertion positioning, poor batch processing of products, etc., to improve the yield rate and ensure high-precision positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
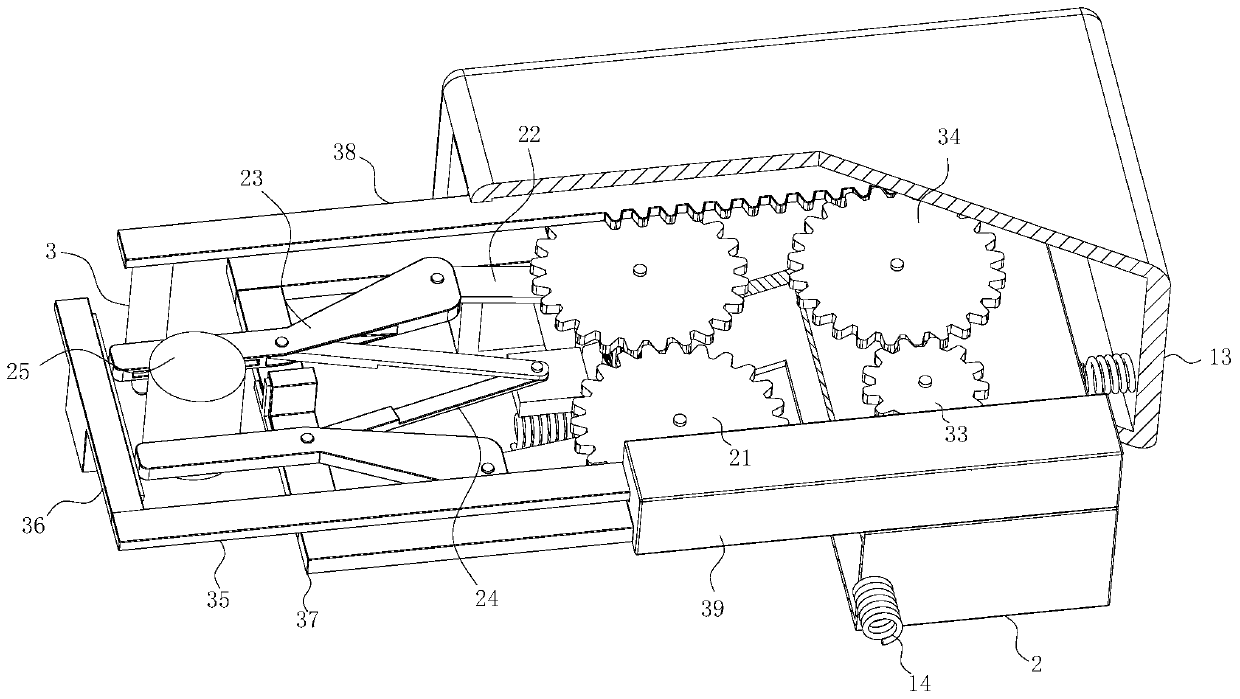
[0025] As an embodiment of the present invention, the power box 2 is slidably connected to the fixed shell 13; the inside of the first cavity is fixedly connected with a uniform Arranged first spring 14; when working, since the power box 2 is in the first cavity and is slidably connected with the fixed shell 13, before the positioning pin 3 is inserted into the positioning hole to realize positioning, the power box 2 will appear in the fixed shell. The phenomenon that the inside of 13 moves forward, backward, left, and right will affect the position positioning of the second connecting rod 23 and the fast and effective clamping of the hot forging blank 25. The evenly arranged first springs 14, through the elastic force of the first springs 14, can make the fixed shell 13 basically located in the middle of the first cavity under the condition of no external force, so the initial position accuracy of the positioning pin 3 can be guaranteed At the same time, it can also prevent t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com