Underwater building defect detection method based on autonomous navigation technology
A technology for autonomous navigation and defect detection, which is applied in the direction of optical testing of defects/defects, instruments, and analysis of solids using sound waves/ultrasonic waves/infrasonic waves. The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
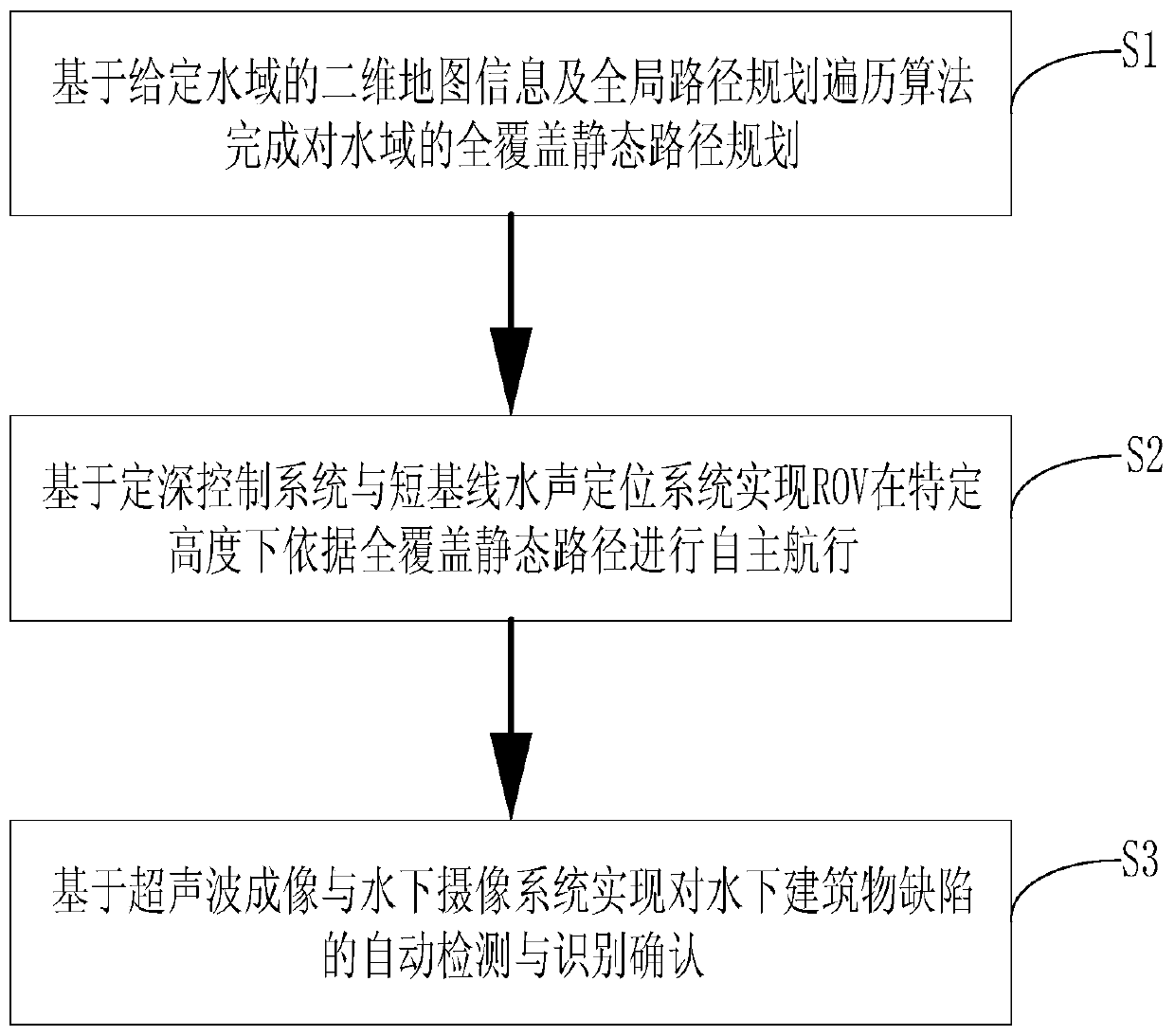
[0013] see figure 1 , the present embodiment provides a method for detecting defects of underwater structures based on autonomous navigation technology, including the following steps,
[0014] Step S1, based on the two-dimensional map information of the given water area, perform full-coverage path planning for the water area to be measured through the combing traversal algorithm;
[0015] Step S2, realizing the autonomous navigation of the ROV in the three-dimensional underwater space through the depth control system, the attitude control system, the motion control system and the short baseline underwater acoustic positioning system;
[0016] Step S3 , detecting and identifying defects of underwater structures through ultrasonic imaging and underwater camera systems.
[0017] In step S1, obtain the two-dimensional map information of the water area to be measured, set the boundary of the water area to be measured, determine the path planning traversal mode and path starting po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com